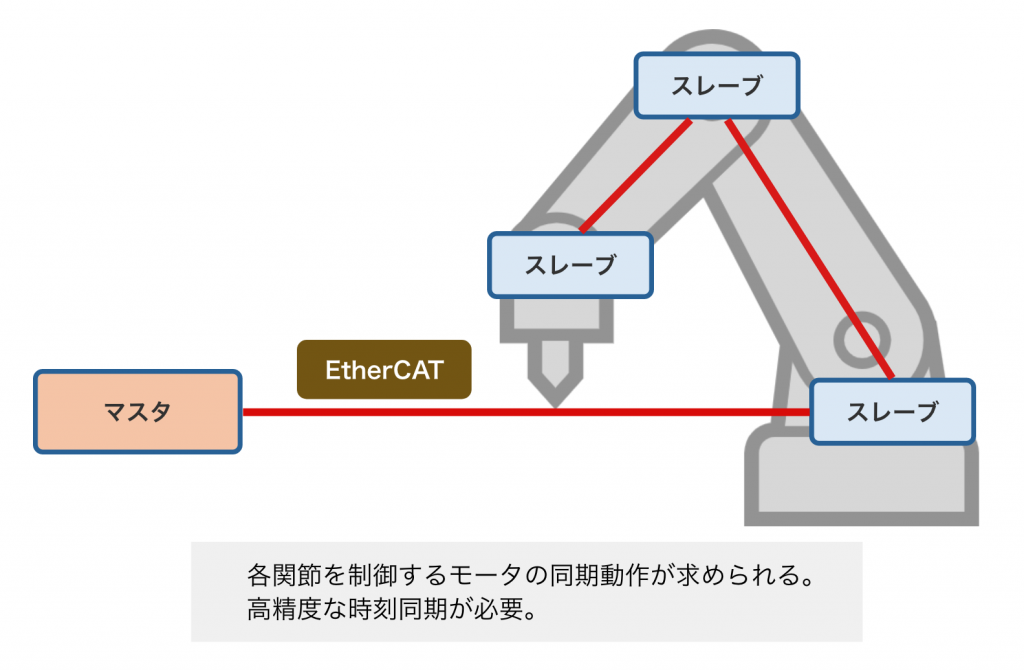
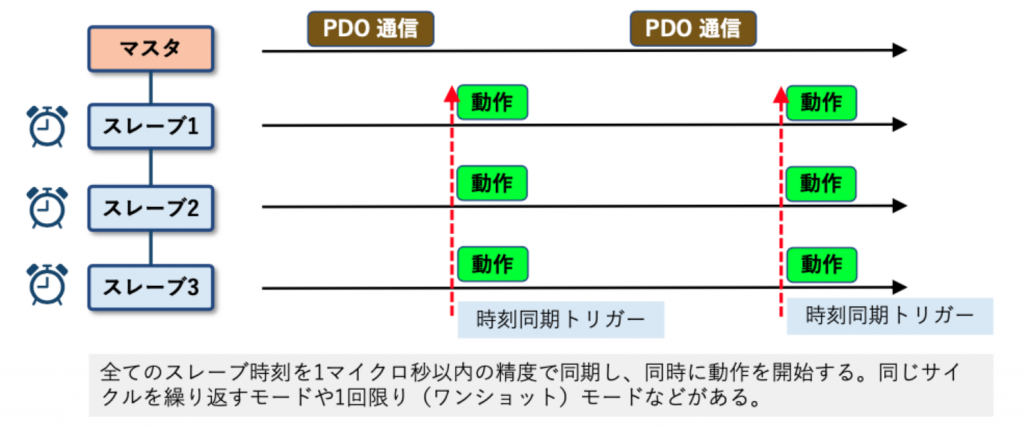
EtherCATは、スレーブ間またはマスタ/スレーブ間で動作タイミングを合わせるための同期動作のモードを用意している。例えば、工作機械のパラメータのダウンロード/アップロードや LED の点灯ならば動作タイミングを合わせる必要はないが、多関節ロボットを動作させるときは各関節を制御するモータ動作は同期する必要がある(図1 参照)。勝手な順序やタイミングで動いたのでは期待通りには動作せず危険だ。
同期をとるためには、マスタと全てのスレーブの時刻が一致している必要がある。EtherCAT では、時刻誤差を1マイクロ秒以内に抑える同期方式を採用している。
産業用途で使用する高精度な時刻同期は、電力と鉄道用に規格化された(ITUT8275.1/8275.2)が最初だ。この規格を基に通信用のプロファイルとして IEEE1588 が制定された。現在の最新規格は、IEEE1588v2 (IEEE1588-2008)だ。高精度時刻同期については、Ethernet TSN の解説の中で改めて説明の予定だ。ここでは省略したい。
フリーラン(Free Run)
同期は取らず、各スレーブが独自の内部周期で動作する。スレーブ間の同期も EtherCAT の PDO 通信フレームとの同期もとらない。動作確認等で使用する。
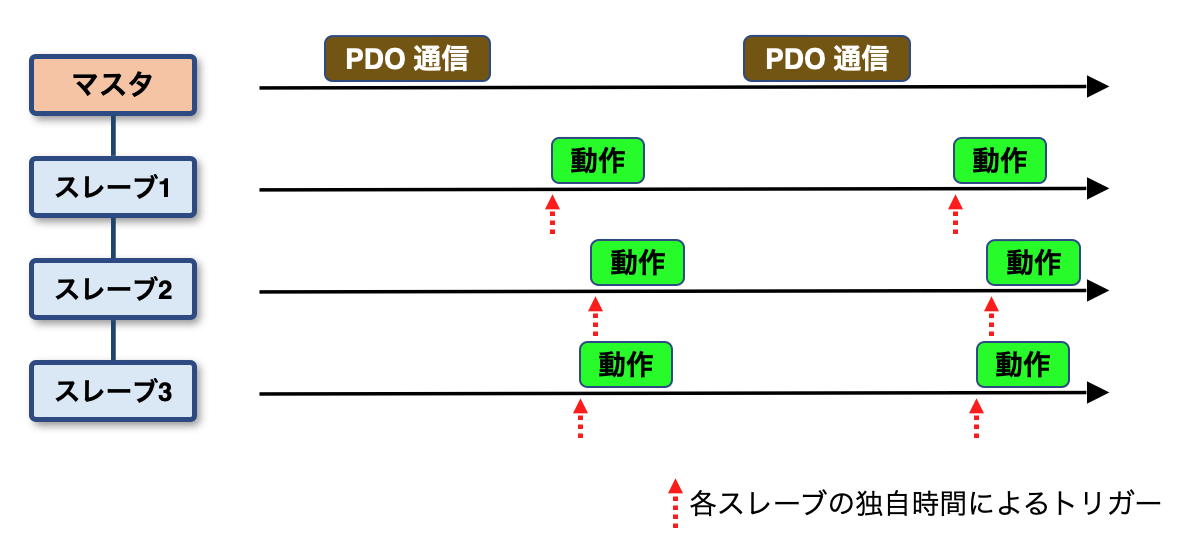
※初掲の図は「1つのPDOに対して複数処理が行われるように誤解を与える」とのご指摘をいただきましたので、図の差替えを行いました(2023/6/29)
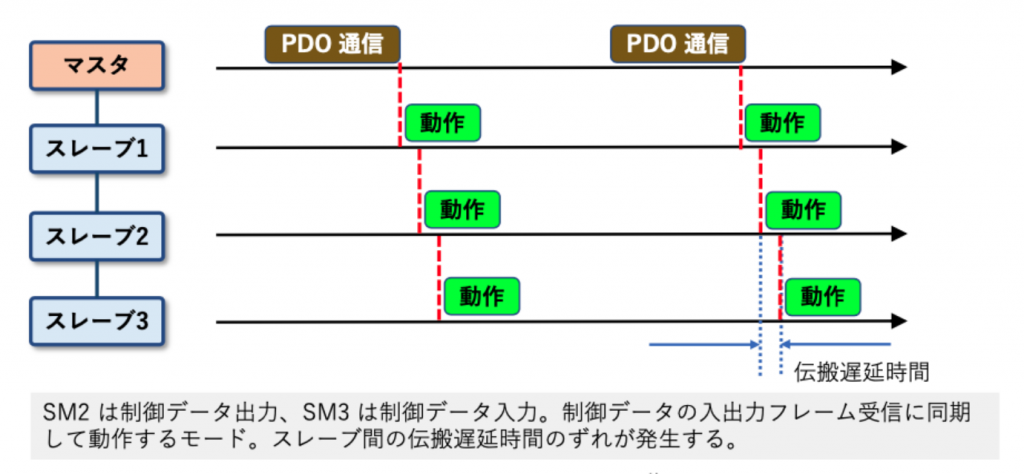
SM 同期(Synchronous with SM)
各スレーブは、SM2 または SM3 のEtherCATのPDO フレーム受信に同期して動作する。フレーム受信タイミングと同期するが、スレーブ間の伝搬遅延時間分のずれが発生する。伝搬遅延時間のずれがあるため、多軸ロボットなどの同期処理には使用できない。
DC 同期( Synchronous with SYNC Event )
スレーブ間の伝搬遅延時間を考慮し、全スレーブの時刻を合わせる(同期する)。時刻ずれ(同期誤差)は1マイクロ秒以内と小さく、ほぼ同じ時刻に合わせることができる。この時刻を使用し、各スレーブで同時に動作を開始するモード。多軸ロボットの制御には不可欠なモードだ。
工場・物流現場のネットワークの現状
-
 2.既存のネットワーク技術
2.既存のネットワーク技術
工場・物流現場のネットワークの技術(1)概要
先ず、IoT現場の現状ネットワーク構成の話からだ。ネットワークの全体構成は図1 のように「情報ネットワーク」と「制御ネットワーク」の2階層に分かれる。更に、制御ネットワークはコントロールレベル/デバイスレベル/センサレベ […]-
 岩崎 有平
岩崎 有平
-
-
2.既存のネットワーク技術
工場・物流現場のネットワークの技術(2)リアルタイム性とは何か
リアルタイム性とは、要求される時間内かつサイクリックに処理が完了できることだ。テレビなどの家電機器、医療機器、自動改札機などの身近な機器から、工作機械や物流機器などのFA分野の機器まで、処理が完了するまでの時間が設定され […]-
岩崎 有平
-
-
2.既存のネットワーク技術
工場・物流現場のネットワークの技術(3)情報ネットワーク
情報ネットワークは、一部の例外を除けばWiFiを含むイーサネットとTCP/IPプロトコルで構成されている。イーサネットは登場してからすでに50年近くが経過し、この間、様々な競合規格が登場した。イーサネットは競合の挑戦を退 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
工場・物流現場のネットワークの技術(4)制御ネットワーク
情報ネットワークと制御ネットワークの違い LAN等の情報ネットワークと制御ネットワークとの一番の違いは「リアルタイム性」だ。情報ネットワークでは、ファイルやプログラム、テキスト、画像音声などのマルチメディア情報などが伝送 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
フィールドバスの実現技術(1)フィールドバスの実現技術
物流や工場の自動化ネットワークは、フィールドバス、産業用ネットワーク、FA ネットワーク、フィールドネットワークなど様々な呼び方がある。IoT 領域のフィールドバスの機能面で最も重要なことは、「ハード・リアルタイム」と「 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
フィールドバスの実現技術(2)シリアルインタフェース
RS232C/RS422/RS485いずれも1本(1対)の信号線で1ビットずつ順番にデータを送信する「シリアル通信」だ。シリアル通信では、受信側は届いたデータ列の始まりと終わりを検出し、データを正しく取り込むために受信側 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(1)産業用イーサネットと課題
産業用イーサネットは、制御ネットワーク分野で急速に勢力を拡大している。新規設置端末数ベースで、2018年にシェア50%を超え、2021年には65%になった。従来のフィールドバスにかつての勢いはない。(図1,図2参照) 制 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(2)EtherNet/IP Ⅰ
産業用イーサネットには2つのグループがある。一方は従来型イーサネットをそのまま採用しているグループ、他方は従来型イーサネット技術を利用しているが、完全な互換性がないグループだ。従来型イーサネットをそのまま使うグループの代 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(3)EtherNet/IP Ⅱ
EtherNet/IP は標準イーサネットとの互換性を保ちつつ、リアルタイム性を実現する様々な工夫をしている。まず、第2層でのスイッチング動作での工夫を紹介する。 第2層のスイッチには、Store & Forwa […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(4)フォーマット四方山話!?
MACアドレスは枯渇する? 図1 は、VLAN なしと VLAN 付きのイーサネットフォーマットだ。いずれのフォーマットも、宛先アドレスで始まる。パソコンなどの受信ノードとしては、受信しなければならない自分宛てのフレーム […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(5)EtherNet/IP Ⅳ 最適なトポロジ
最適なトポロジ EtherNet/IP は OSI の第2層と第1層に従来型のイーサネットを使用し、ほぼ全てのトポロジに対応できる。ただし、バス型トポロジは、初期の 10BASE-5/2 では対応していたが、 10BAS […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(6) EtherNet/IP Ⅴ DLR 動作概要
DLR 動作概要 DLR(Device Level Ring)は、 EtherNet/IP 用として2008年に公開された第2層で動作する冗長経路制御プロトコルだ。DLR は下位層のイーサネットや上位層の TCP/IP […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(7)EtherNet/IP Ⅵ DLR 動作概要 と障害検知
障害検知 主な障害検知は2種類だ。1つは隣接するノードとのリンク切断(Link off)、もう一つはビーコン・フレームのタイムアウトだ。図1 はリンク切断のケースで、この例では、Node-3 とNode-4 の間が切断さ […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(8)EtherCAT
EtherCAT EtherCAT (CAT:Control Automation Technology)は、ドイツのベッコフオートメーション(Beckhoff Automation)が開発し、ETG(EtherCAT […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(9)EtherCAT の基本動作
EtherCAT の基本動作 EtherCAT は ライン・トポロジが基本で、1台のマスタと複数のスレーブで構成する。図1 は1台のマスタと3台のスレーブで構成される例だ。マスタが送信した1つのイーサネットフレームが全て […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(10)EtherCAT のデータ通信
EtherCAT のデータ通信 EtherCAT のマスタ/スレーブ間通信には2つの方式がある。1つは、スレーブに接続された工作機械やロボットなどを動かすために周期的に制御データを配信するPDO( Process Dat […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(11)EtherCAT の同期動作
EtherCATは、スレーブ間またはマスタ/スレーブ間で動作タイミングを合わせるための同期動作のモードを用意している。例えば、工作機械のパラメータのダウンロード/アップロードや LED の点灯ならば動作タイミングを合わせ […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(12)EtherCAT のエラー検出
エラー検出/FCSエラー フレーム末尾の FCS 受信を待たず送信を開始する On The Fly の課題は、エラー処理だ。図1 のように、スレーブはフレーム末尾の FCS 受信前にデータの入出力と次段への送信を開始する […]-
岩崎 有平
-
-
2.既存のネットワーク技術
産業用イーサネット(13)EtherCATのフレーム構造
EtherCATのフレーム構造 図1(A) に示すように、EtherCAT は標準イーサネットフレームを使用し、マスタは On The Fly 処理がないため、マスタ側のEtherCAT インタフェースは一般的なイーサネ […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(1)概要・歴史
QoS はなぜ必要? QoS( Quality of Service)は、ネットワーク上のサービスを効率よく安定して運用できるように、データ送信量や順序を調整する技術だ。ネットワークには様々なデータが混在している。用途や […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(2)産業用イーサネット の QoS
産業用イーサネット の QoS 産業用イーサネットには、Ethernet/IP、PROFINET、EtherCAT や Ethernet TSN などがある。 「バス共有」の考え方を持ち込んだ産業用イーサネットは、優先制 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(3)QoS はなぜ必要? 要件の変化・輻輳の発生
Internet 技術に思うこと Internet の基幹技術は TCP/IP とイーサネットだが、イーサネット以外の様々な通信網(物理層)とも一体となり発展と変化を遂げてきた。ARPANET のパケット交換、Rober […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(4)QoS 評価項目
図1 のQoSの評価項目について解説をする。 帯域/帯域幅 帯域は、通信などで使用する電波や光の周波数の幅、つまり「最高周波数」と「最低周波数」の差だ。さらに厳密にいえば、図1 のように最大レベルから 3dB 下がった点 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(5)QoS 体系と優先制御
QoS には3つのカテゴリがある。Best Effort/優先制御/帯域制御だ。最初に登場したのは、QoS 機能を全く持たない 「Best Effort」、次に「優先制御」が登場した。優先度の高いパケットを先に送信する制 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(6)優先制御 マーキング /キューイング/スケジューリングと輻輳回避
マーキング クラス分類したパケットにキュー番号などのキュー識別コードを割り付ける。マーキングは装置内部処理のため、ユーザはあまり意識する必要はない。 キューイング マーキングされた識別コードと一致するキューにパケットを格 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(7)優先制御の限界
現在の QoS(Quality of Service)は、優先制御と帯域制御で実現している。QoS 登場以前は Best Effort で、パケットは到着順にキューに格納され、キューが溢れると廃棄される。この問題を解消す […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(8)帯域制御
優先制御の欠点を補完するため帯域制御が登場した。帯域制御は、帯域に敏感な音声・映像やインタラクティブな通信に必要な帯域を確保するとともに、バーストを抑制することで限られた帯域を有効に使うためのツールだ。 スイッチやルータ […]-
岩崎 有平
-
-
2.既存のネットワーク技術
QoS(9)帯域制御の制御方法 トークンバケット/リーキーバケット/万能リーキーバケットモデルとは
優先制御とポリシングでは「トークンバケット」、シェーピングでは「リーキーバケット」と呼ばれる制御方法を使用することが多い。幾つかの例を交え、トークンバケットとリーキーバケットの説明をしたい。ちなみに、Backet はバケ […]-
岩崎 有平
-
-
2.既存のネットワーク技術
イーサネットの物理層(1)概要・物理層のトレンド・物理層基礎技術
イーサネットを底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最下層の物理層 […]-
岩崎 有平
-
-
2.既存のネットワーク技術
イーサネットの物理層(2)物理層基礎技術 パラレル通信とシリアル通信 / クロック同期方式
パラレル通信とシリアル通信 コンピュータ間通信方式はパラレル通信とシリアル通信に大別することができる。パラレル( parallel:並列)通信は、複数データを並列に同時送信するため高速通信が可能だが、複数のデータ線が必要 […]-
岩崎 有平
-