【2】BMCA/【3】クロックドメイン
通信機器やノードの時刻同期をとる前に、必要なことが2つある。時刻同期の基準時間となる「グランドマスタ(GM)」の選択と、時刻同期の配信経路を確定しクロックドメイン(時刻同期の範囲)を設定することだ。GM の選択方法を BMCA( Best Master Clock Algorithm )と呼ぶ。
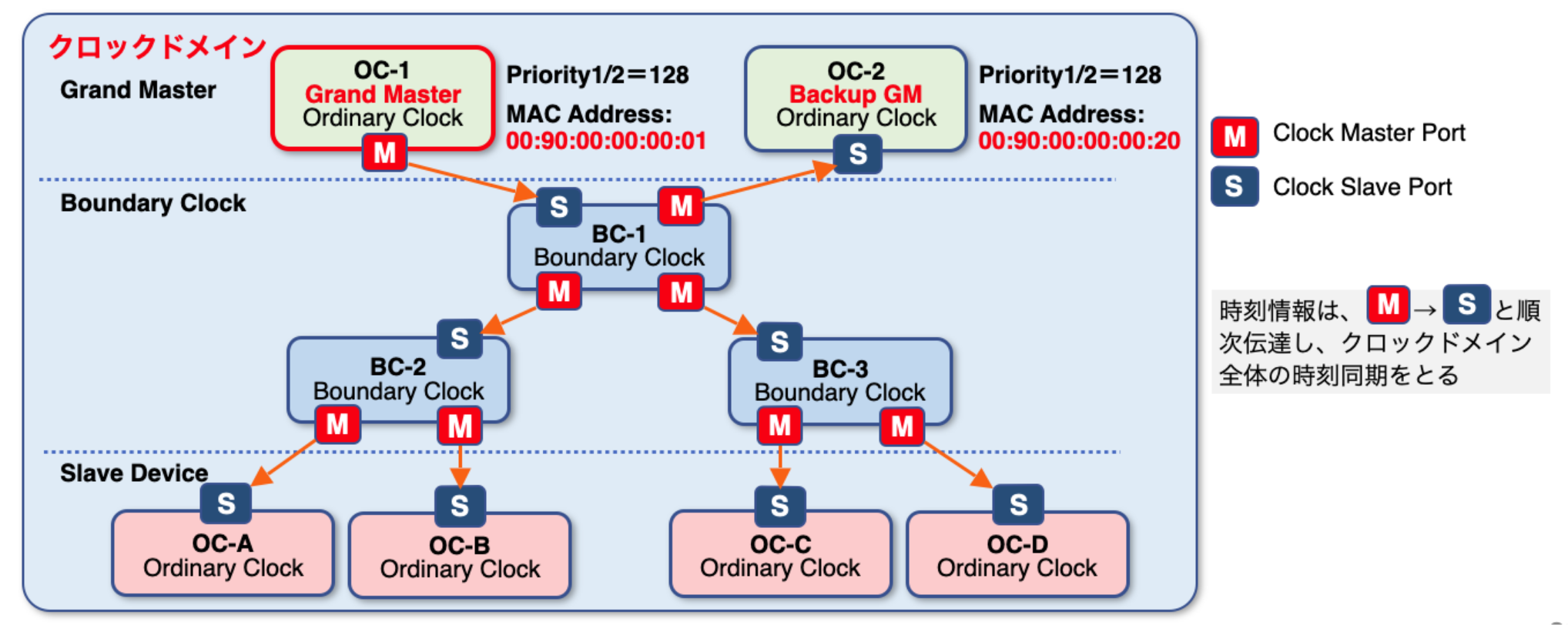
gPTP ネットワークでは、1つのクロックソースが GM として選出される。他の通信装置やノードは、 GM に従うことで全体の時刻同期を実現している。図1 は、 GM を選出し、クロックドメインが構成された例だ。gPTP で登場する機器(デバイス)は表1 に示すように、GM、OCとBC の3種類 で、GM は OC の一種だ。gPTP では TC をサポートしていない。
| 略号 | 名称 | 概要 |
|---|---|---|
| GM | グランドマスター Grand Master | GNSS 等の時刻源に接続されたデバイス。gPTP 内で最優先で使用するクロックソースで、ドメイン内のすべてのクロックは GM と同期する。ドメイン内に複数の GM が存在する場合は、 BMCA(Best Master Clock Algorithm)で最適な GM を選択する。最適ではない GM は、 Backup Grand Master になり、機能的にはスレーブになる。 |
| OC | オーディナリークロック Ordinary Clock | 単一の gPTP ポート を持つデバイス。次のいずれかのモードで動作する。 ■マスター モード:ネットワーク経由で 1 つまたは複数のスレーブデバイスに時刻情報を配信する。その結果、スレーブデバイスはマスターに時刻同期する。GM がこれに相当する。■スレーブモード:クロックをマスタークロックに時刻同期させる。最終段のデバイス(PC、表示装置、工作機械等)がこれに相当する。 |
| BC | バンダリクロック Boundary Clock | 複数の gPTP ポートを持つデバイス。上位のマスターに対してスレーブとして動作し、自身の時刻を補正(マスターに合わせる)する。下位に接続されたスレーブに対してはマスターとして動作する。GM に複数の機器を同期させる際に gPTP の負荷を分配することができる。適切なマスタークロックが検出されない場合は、GM として動作することもできる。 gPTP では、BC は第2層スイッチの機能として実装される。 |
| TC | トランスペアレント クロック Transparent Clock | BC と同様に GM に複数機器を時刻同期させるための PTP フレーム分配に使用。スイッチ内を通過する PTP フレームの転送にかかった時間をフレーム内の「補正値」領域に書込み、次段に渡す。つまり、スイッチは時刻同期を取らず、転送のみを行う。タイミング計算については透過的なデバイス。時刻同期を取らないため、GM にはならない。gPTP ではサポートしていない。 |
赤枠内は、gPTP がサポートするデバイス。gPTP は全てのスイッチが時刻同期をとる方式のみサポートするため、時刻情報を通過させる TC は使えない。
時刻情報が流れる範囲が「クロックドメイン」だ。IEEE1588(PTP)は、128個のクロックドメイン を設定できるが、gPTP では1個のクロックドメインしか設定できない。ドメイン番号は「0」に決められている。
Ethernet TSN は全てのトポロジに対応している。リングやメッシュなどのループがあるトポロジでは、ループを論理的に遮断することができる。ループ遮断プロトコルは、標準イーサネットで一般的に使われる RSTP(Rapid Spanning Tree Protocol)を想定している。Ethernet TSN(IEEE802.1AS で規定)と RSTP の仕組みは変わらないが、用語が異なるので注意が必要だ。用語の対応は、表2 を参照いただきたい。RSTP の動作は改めてお話しするので、ここではループのない構造で話を進めたい。
| IEEE802.1AS(Ethernet TSN) | IEEE802,1Q(RSTP) |
|---|---|
| Clock Master Port | Designated Port |
| Clock slave port | Root Port |
| Passive Port | Alternate Port |
Ethernet TSN では、時刻情報を配信する装置間リンクの上位側ポートを「Clock Master port」、下位側を「Clock Slave port」と呼ぶ。グランドマスターが配信する時刻情報は、水の流れのように下 位層(下流)に向かって流れ、エンドノード(OC)で止まる。この時刻情報が流れる範囲が「クロックドメイン」だ。水が流れ出すリンクの上位側(上流)を「Clock Master port」、水を受け止 めるリンクの下位側(下流)を「Clock Slave port」と呼ぶ。時刻情報は、 Clock Master port から Clock Slave port へと順次伝播する。
BMCA は、ネットワーク上で最適な時刻源(GM)を決定する方法だ。BMCA はネットワーク上で常 に動作し、新しい GM の登場や動作中の GM 故障などのネットワークの変化に迅速に対応し、最適
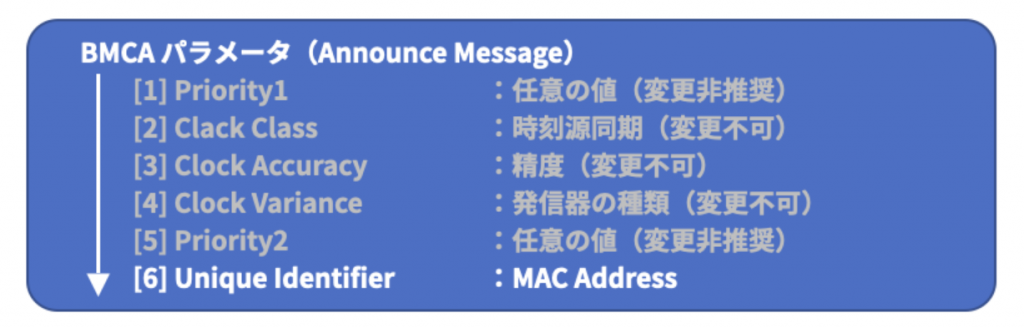
な GM への切り替えを行う。最適な GM の選択には図2 の6個のパラメータを[1]から順次比較し、差が生じたところで決着する。いずれの項目も、値が小さい方が優先度が高い。
標準のPTP では Priority2 を変更できるが、[1]~[4] のパラメータ変更は推奨していない。gPTP は [1]~[5] のパラメータの変更を推奨していないため、[6] Unique Identifier(MAC Address)の小さい方が最適な時刻源に選ばれる。この場合の MAC Address を「Tie Breaker」と呼ぶ。GM 候補は、この6個のパラメータを Announce Message で2秒に1回交換することで、常に最適な GM が選ばれる。
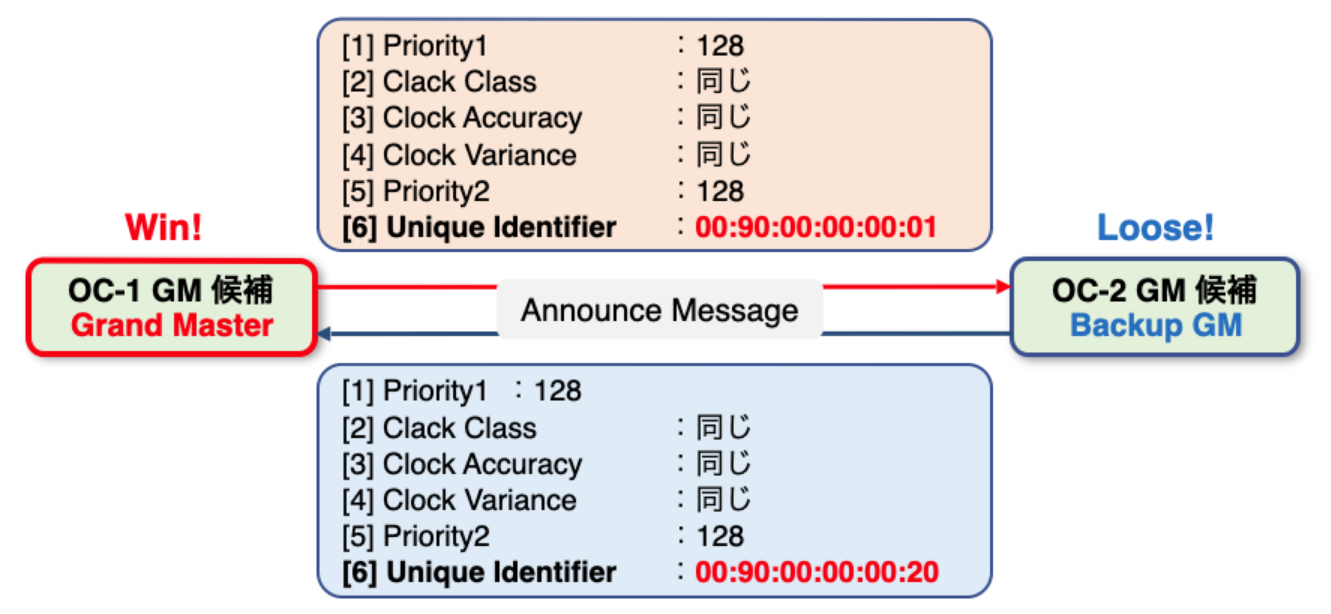
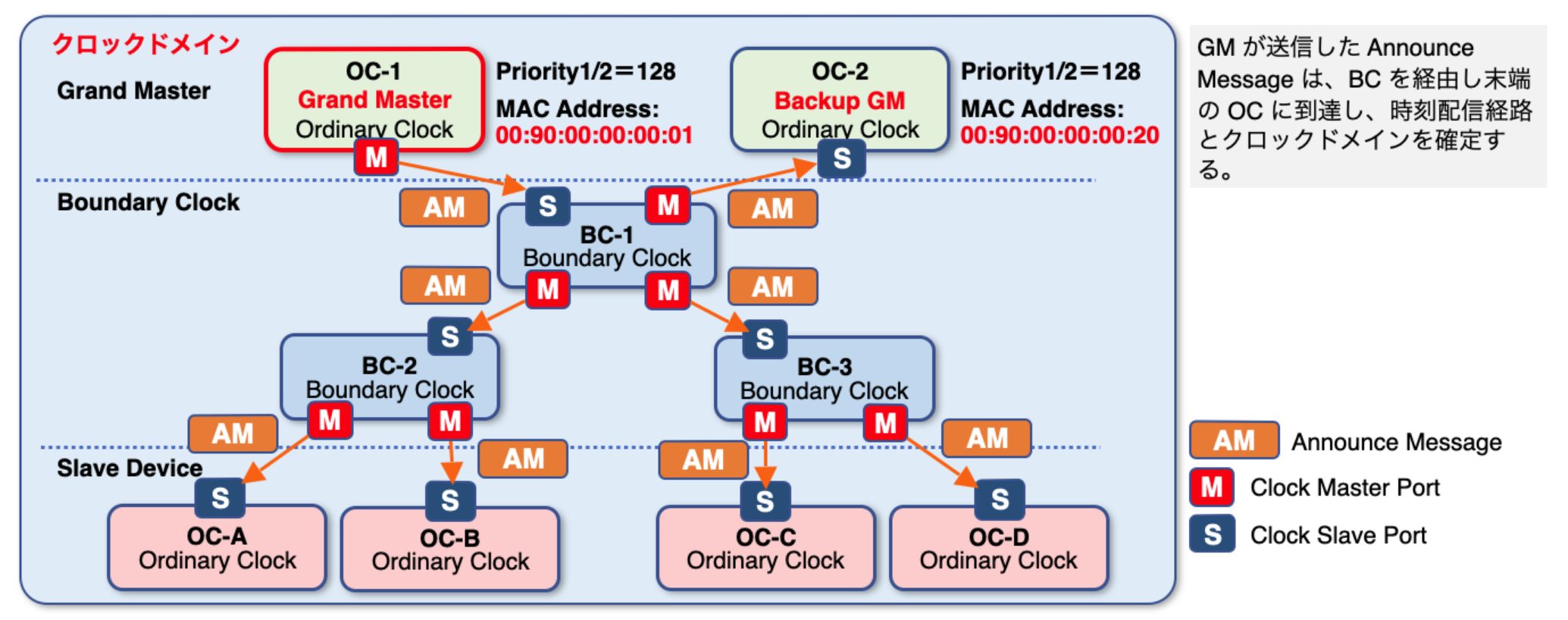
2つの GM 候補が BC を介して接続した例が図3 だ。GM 候補の OC-1 と OC-2 は相互に各 GM の優先度情報を含む Announce Message を送信し、優先度を比較する。優位な方が GM になり、劣勢な方は Backup GM としてスレーブ動作に移行する。この例では、OC-1 の MAC Address が小さいため GM になる。
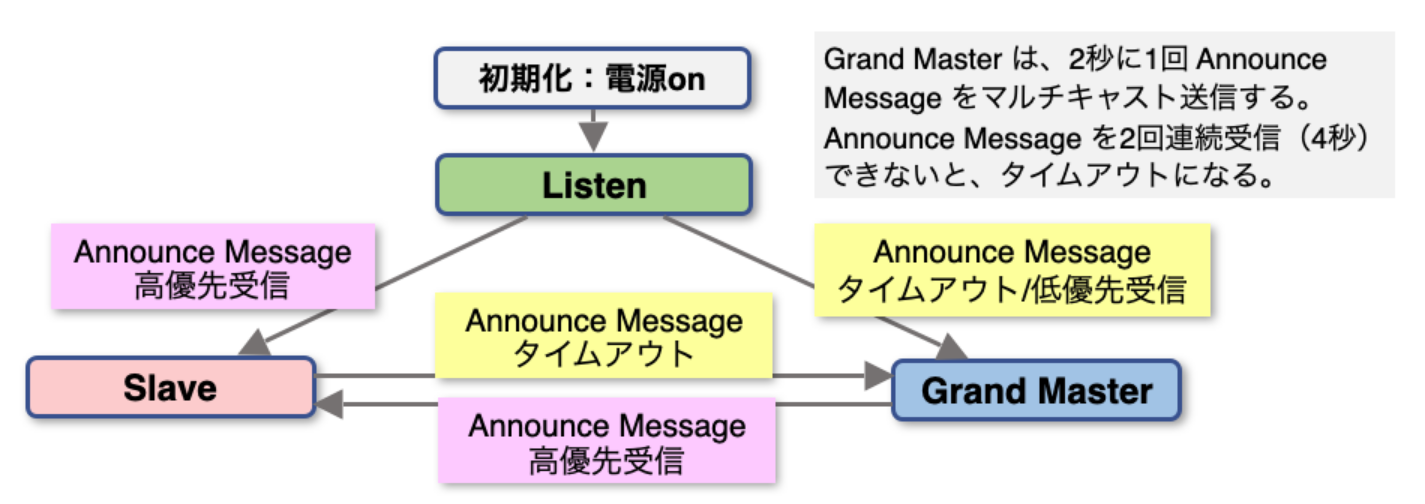
BMCA では、図3 の様に Announce Message を交換し合うケースだけではなく、様々な状況が考えられる。例えば、運用中の GM が停止し Backup GM に切り替わるケースや、新たな GM が追加されるケースなどが考えられる。BMCA は図4 のような状態遷移を設定し、全てのケースに対応している。電源投入などの初期状態から「Listen」状態に遷移すると、Announce Message タイムアウト時間 Listen 状態を保持し、外部の Announce Message を待つ。Announce Message がなければ、自分自身が唯一の GM と判断し Grand Master になる。自分自身より優位な Announce Message を受信すると Slave になる。Master または Slave に遷移後も、Announce Message により状態を変える。
BMCA での GM 決定と同時に、Announce Message は順次下位の BC を経由し、末端の OC に到達する。リンクの上位側が「Clock Master Port」、下位側が「Clock Slave Port」になり、時刻配信経路とクロックドメインが決まる(図5)。
初期状態での BMCA 、Grand Master の切り替え(故障等による)には、4秒の待ち時間が発生する。ホームネットワークや産業オートメーショでは大きな問題にならないが、自動車では使えない。自動車では BMCA を使用せず、GM(時刻源)は固定設定になる。
Ethernet TSN
-
 3.Ethernet TSN
3.Ethernet TSN
Ethernet TSN(1)イーサネットの歴史〜 LAN と基幹網の主役になるイーサネット・フィールドネットワークの変遷
LAN と基幹網の主役になるイーサネット イーサネットは、登場以来競争の歴史だ(図1)。1980年2月 IEEE802 規格が正式に決まり、イーサネットは始まった。IEEE802 の名称はこの会議の開催日に由来する。登場 […]-
 岩崎 有平
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(2)Ethernet TSN の狙い
Ethernet TSN の狙いは明確だ。インターネットや各種クラウドサービスから、IoT の様々なデバイスまでをシームレスにカバーすることだ(図1 参照)。 しかし、Ethernet TSN が新たな産業用イーサネット […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(3)キーポイント:時分割多重の概要
Ethernet TSN のキーポイントは、サイクル時間や遅延時間に敏感な制御データ、伝送帯域に敏感な映像や音声などのストリーミングデータと再送を許容できる Best Effort データの混在を実現することだ。もちろん […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(4)時分割多重における時刻精度
【1】1マイクロ秒以下の時刻精度 時分割多重を実現するためには、スイッチなどの伝送装置や、システム構成によっては送受信ノードの時刻同期が必要だ。同じ時刻に全てのスイッチやノードが、一斉に時間帯を切り替えることで時分割多重 […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(5)時分割多重における時刻基準と配信経路
【2】BMCA/【3】クロックドメイン 通信機器やノードの時刻同期をとる前に、必要なことが2つある。時刻同期の基準時間となる「グランドマスタ(GM)」の選択と、時刻同期の配信経路を確定しクロックドメイン(時刻同期の範囲) […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(6)時分割多重における時刻同期メカニズム
【4】第2層 PTP メッセージ/【5】Peer-to-Peer メカニズム/【6】2ステップクロック BMCA で時刻基準となる 「GM」 が決定し、時刻同期をとる領域である「クロックドメイン」と時刻情報の「配信経路」 […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(7)GPS 四方山話!?
カーナビでおなじみの位置情報を提供する衛星を「GPS」とか「GPS衛星」と一般的には呼んでいる。しかし、GPS は米国が打ち上げた衛星のことだ。米国はいち早く、軍用や航空機・船舶等の航法支援用として衛星を打ち上げ、サービ […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(8)時分割多重におけるプリエンプションの概要
工場や物流現場の様々な機械やロボットを期待通りに動かすためには「ハード・リアルタイム」が欠かせない。Ethernet TSN は、ハード・リアルタイムを実現する基本的な仕組みとして、時刻同期による時分割多重を導入した。一 […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(9)プリエンプション機能追加と従来機器との互換性
イーサネットフレームの変更は久しぶりだ。1988年に IEEE802.1Q-1988 に VLAN が追加されて以来だ。VLAN 追加での一番の懸念事項は、フレーム長が4バイト長くなり長さ制限でフレームが廃棄される恐れが […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(10)プリエンプション機能追加と各フラグメント
プリエンプションは、分割した最初のフレームを「開始フラグメント」、その後に幾つかの「継続フラグメント」が続き、最後に「最終フラグメント」になる構造だ。開始/複数の継続/最終フラグメントを順序を含め識別するコードを埋め込み […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN(11)プリエンプション機能追加
開始フラグメント、継続フラグメントと最終フラグメントの構造はお話しした。開始フラグメントの SMD-Sx 、SMD-Cx とFragment Count の8ビットの不思議な数値について説明する。 SMD-Sx 図1 の […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(1)IntServ(イントサーブ)
Ethernet TSN の QoS 体系での位置づけは図1 のようになっていて、優先制御と帯域制御を組み合わせることで、リアルタイム性を実現している。優先制御は SPQ(Strict Priority Queueing […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(2)Ethernet AVB 登場
従来のアナログ AV 機器は、ほぼ全ての機器を 1対1 でケーブル接続することが常識だ。しかも、ケーブルやコネクタ規格はインタフェースごとに異なるため、オーディオ機器の背面には多くのコネクタがあり、様々なケーブルが這いま […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(3)IEEE 802.1Qat:SRP / 配信手順
SRP(Stream Reservation Protocol:ストリーム予約プロトコル)は、ストリームの配信経路を確定し、経路上のスイッチやエンドステーション(映像表示装置など)の帯域確保と最悪時の遅延時間の確認を行う […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(4)IEEE 802.1Qat:SRP / MSRP 動作とストリーム配信の可否判断
ネットワーク構成を単純化したモデルで、改めて MSRP の動作と Talker と Listener が送信する各種パラメータを説明したい。 図1 はMSRP 説明モデルで、次の要素からできている。全ての要素には MSR […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(5)IEEE 802.1Qat:SRP / MSRP 属性
Asking、Advertise、Ready メッセージを交換することで、Talker/Listener 間の帯域や遅延時間などの QoS リソース確保を行うことはすでに説明した。これら以外にも、Talker/Liste […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(6)その他時間帯の QoS:SPQ(絶対優先)
Ethernet TSN は、ハードリアルタイムが必要な工作機械などの制御データとその他のデータの時間帯を分けている。制御データが収まる「CDT専用時間帯」は、従来のフィールドバス同様に厳密なタイミングやデータ量設計を行 […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(7)その他時間帯の QoS:Credit Based Shaper(帯域制御)
CBS( Credit Based Shaper)の基本動作原理は、リーキーバケットモデルだ。図1 の様に、蛇口から注いだ水がバケツの穴から常に一定量漏れ出すモデルだ。さらに細かく分類すれば「 Leaky bucket […]-
岩崎 有平
-
-
3.Ethernet TSN
Ethernet TSN の QoS(8)全体動作検証
Ethernet TSN は、制御データを確実に伝送する「CDT 専用時間帯」と、プロトコル制御データ(gPTP、SRP 等)、映像ストリームやファイルなどの Best Effort データを伝送する「その他時間帯」に分 […]-
岩崎 有平
-