CAN 規格の歴史
CAN(Controller Area Network)は、、1983年にBosch社が開発した通信プロトコルだ。1986年に公式発表され、1987年に販売を開始した。CAN は数度に渡り規格が改定されている。1991年に CAN 2.0 を発行した。CAN 2.0 には2つのバージョンがある。CAN 2.0A は11ビットの識別子を持つ標準フォーマット、CAN 2.0B は29ビットの識別子を持つ拡張フォーマットだ。1993年に ISO 11898 に登録され、その後データリンク層を規定する ISO 11898-1、高速 CAN 物理層を規定する ISO 11898-2 に再構成された。さらに低速 CAN 物理層を規定する ISO 11898-3 が発表された(図1)。
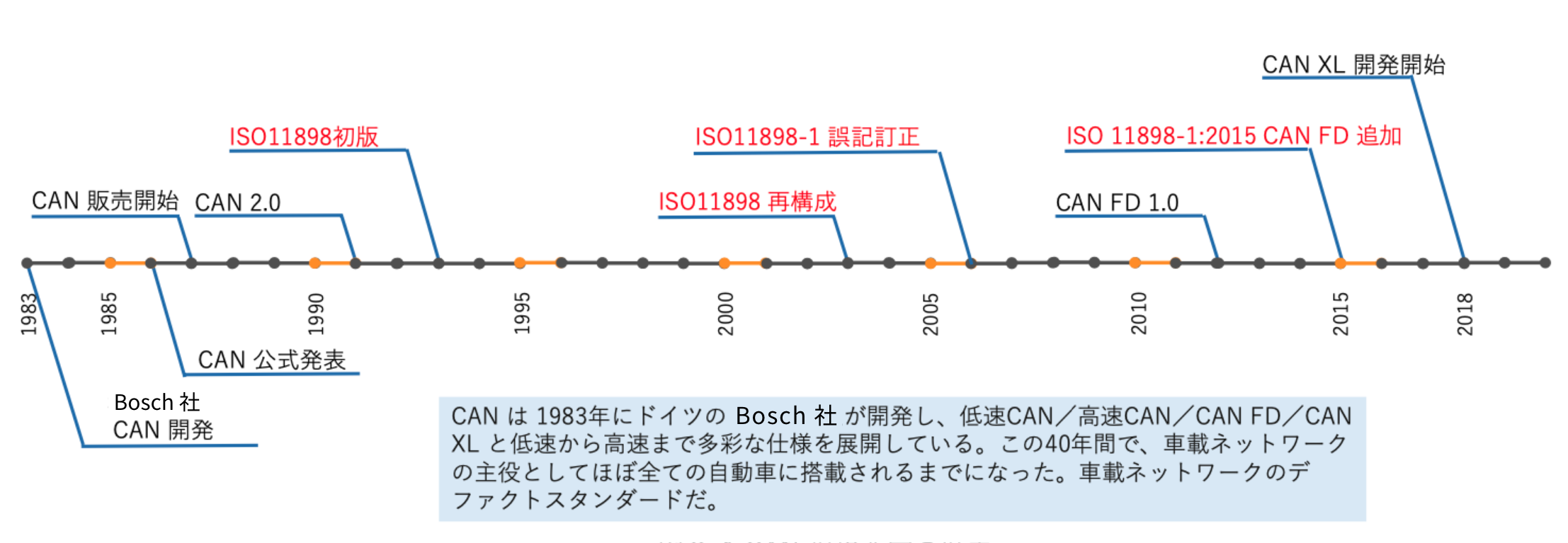
その後も、Bosch社は CAN 規格を拡張し、 CAN FD ( CAN with Flexible Data-Rate)を2012年に発表している。CAN FD は、調停(アービトレーション)の後、ビットレートを切り替える機能や8バイトを超えるデータ長のサポートする機能を新たに規定している。2018 年に CAN XL を、2021年には CAN FD Light を発表している。
米国や EU では、自動車の自己診断標準である OBD2 に対応するプロトコルとして、CAN 等の搭載が義務付けられている。まさに、自動車業界のデファクトスタンダードだ。
CANの適用分野
CANは車載ネットワーク用として開発された。しかしこの20年ほどの間に、他の業界でもCAN の信頼性やメリットが認識され、幅広い用途でCANが導入された。鉄道用途として、路面電車、トラム、地下鉄などに CAN が導入されている。航空宇宙用途にも採用されている。医療機器分野では、医療機器間ネットワークとしてCANを利用している。手術室の照明、手術台、カメラ、X線装置、患者用ベッドなどを CAN で接続し、システムとして制御している。
CAN の適用領域は、確実な伝送が求められる(ハードリアルタイム性)領域だ。リアルタイム性が必須ではない領域や高速伝送が要求される通信分野での採用事例は少ない。

CAN 自動車制御での位置付け
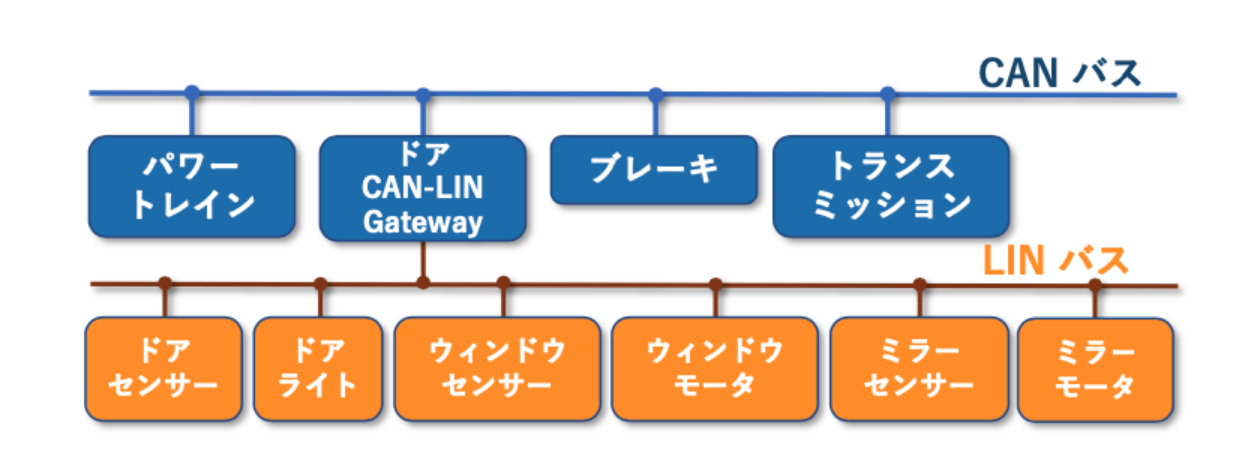
最近の自動車には、数十個の ECU(Electronic Control Unit)が搭載されている。エンジンなどのパワートレイン制御、ステアリングやブレーキなどのシャシー制御だけではなく、パワーウィンドウ、ミラー調整、電動シート、ドアロックなどのボディ制御にも ECU の利用は広がっている。
単独で動作するサブシステムもあるが、他のサブシステムとの通信が必要なシステムが多数ある。 CAN はサブシステム間の通信を担う技術として開発された。例えば、駐車支援システムでは、ギアをバックに入れると、カーナビ画面がバックモニターに切り替わり、助手席側のドアミラーが縁石が見える位置まで傾く。雨が降っていれば、雨滴を検出しリアワイパーが動く。この程度のシステムでも、多くのセンサーや駆動系が連携して動作する。今や、複数の ECU をつなぎ連係動作を可能にする「車載ネットワーク」抜きでは自動車は作れない時代だ。
車載ネットワークには、CAN、LIN、MOSTやFlexRayなどがあるが、CAN は主に信頼性や確実性が求められるところに使用される。通信速度や信頼性に厳しくないボディー系には CAN のサブバスとして LIN が使われている。
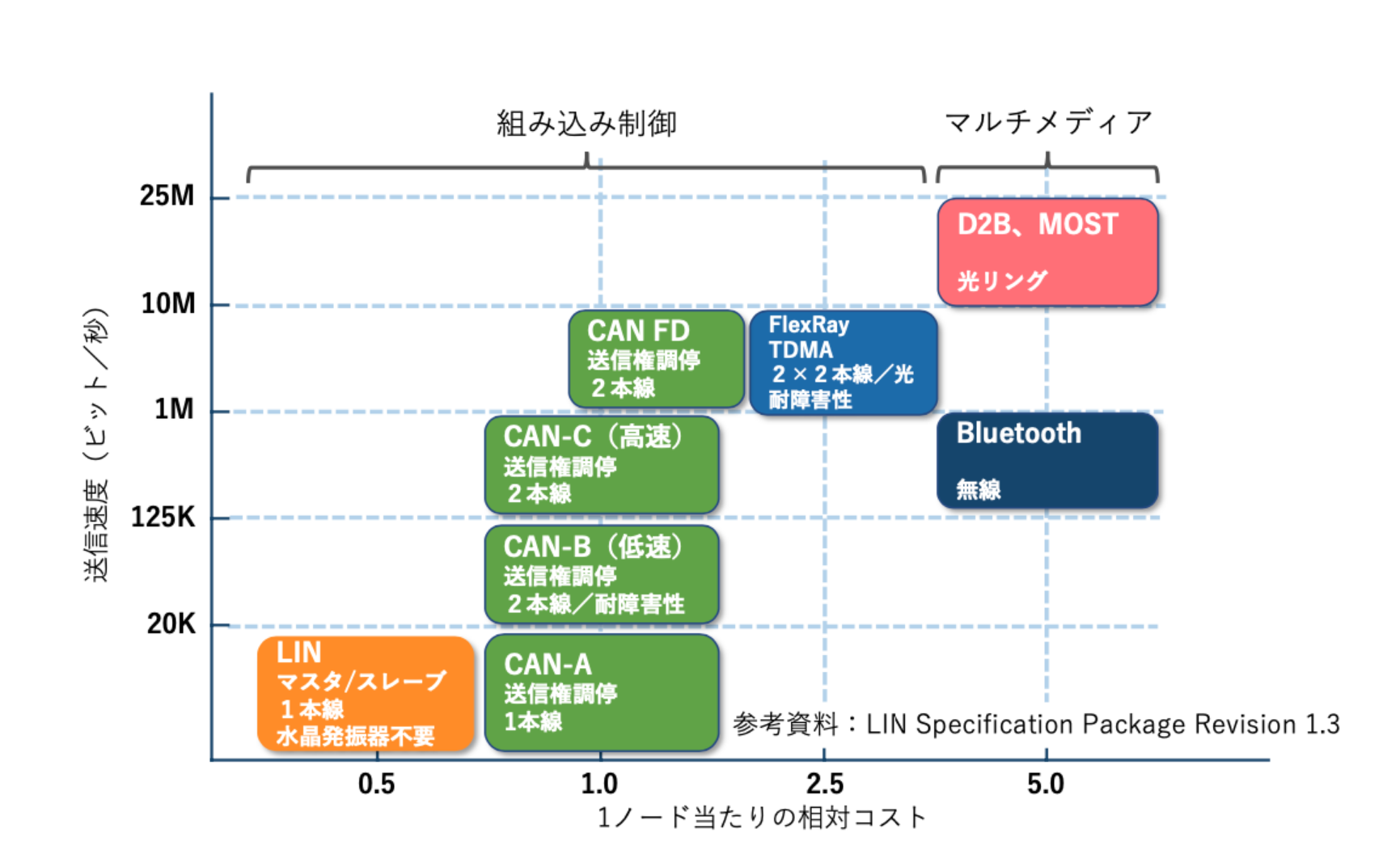
CAN 規格位置付け
図4 は、 20年前に LIN コンソーシアムが発表した資料を基に作成した車載ネットワークの相関図だ。高速通信分野では CAN 、低速・低価格分野では LIN が制御用車載ネットワークの主役だ。 CAN-A と LIN は競合するが、コスト面で有利な LIN が強い。より高速な分野では、CAN FD と FlexRay が競合するが、CAN と上位互換性がある CAN FD が強く、FlexRay は劣勢だ。今後は、ギガの帯域幅も含め、CAN と Ethernet TSN の主導権争いが始まりそうだ。
CAN 規格概要
SAE(Society of Automotive Engineers)では、CAN の通信速度で以下の様なクラス分けをしている。ISO規格では、クラスC は高速 CAN(High Speed CAN)、クラスBを低速 CAN(Low Speed CAN)と呼ぶ。特に混乱のない限り、ISO の名称を使用する。また、物理層の違いは上位のリンク層には影響を与えないので、特に断りのない限り「高速 CAN 」を前提に話を進める。
| SAE クラス | ISO 規格 | 通信速度 | 主な用途 |
|---|---|---|---|
| クラスA | ー | ~10kbps | パワーウィンドウ、ミラー、ライト類 |
| クラスB | 低速 CAN(Low Speed CAN) | 10~125kbps | 故障診断、メータ表示系、空調類などの情報系 |
| クラスC | 高速 CAN(High Speed CAN) | 125kbps~1Mbps | パワートレイン、トランスミッション、ブレーキなどリアルタイム系 |
表2 は、ISO で規定する高速 CAN と低速 CAN の主な規格だ。
| 項目 | 規格概要 | |
|---|---|---|
| 高速 CAN | 低速 CAN | |
| データリンク層規格 | ISO 11898-1 | |
| ネットワーク構成 | マルチマスタ方式 | |
| アクセス制御 | CSMA/CA または CSMA/CR | |
| データ識別 | メッセージ・アドレッシング | |
| フレーム形式 | データフレーム・リモートフレーム オーバーロードフレーム・エラーフレーム |
|
| ネットワークトポロジ | バス型 | |
| 伝送路 | 2線式/差動電圧 | |
| 伝送方式 | 半二重通信 | |
| 物理層規格 | ISO 11898-2 | ISO 11519 |
| バスの形状 | 両端終端 | プルアップ |
| 通信速度 | 最大 1Mbps | 最大 125Kビット/秒 |
| 最大バス長 | 40m/1Mbps | 1km/40Kbps |
| 接続ノード数 | 最大 30台 | 最大 20台 |
| フォールトトレラント | なし | なし |
CAN トポロジ
ネットワークに接続する通信機器を「ノード」と呼び、複数のノードを相互接続しネットワークを構成する方法を「トポロジ」と呼ぶ。車載ネットワークでは、ECU( Electronic Control Unit )がノードになる。トポロジには、 Bus/Line/Star/Tree/Ring/Mesh がある(図5)。一般的なオフィスネットワークのトポロジの要件は、次の3点だ。
- 配線コスト :配線及び配線工事を極力抑える
- 配線集中 :配線の集中を避ける
- 冗長性 :切断などの配線トラブルの高速検出・復旧ができる
車載ネットワークではこれらの要件に加え、次の2点も重要だ。
- 配線スペース・ケーブル重量削減
- 接続が容易
CAN は、配線スペース・ケーブル重量削減や接続の容易性を優先し、バス型を選択した。バス型は、配線設計が比較的簡単で、ノードの増設削除も難しくない。半面、冗長性がなく1カ所の障害が全体に及ぶ欠点がある。

車載ネットワーク
-
 4.車載ネットワーク
4.車載ネットワーク
車載ネットワーク(1)変遷
自動車の基本的な機能(走る・曲がる・止まるなど)は、機械や油圧などの機能ごとの比較的単純な制御だった。アクセルペダルを踏めば加速し、ブレーキペダルを踏めば車が止まる。排ガス規制やエンジン高性能化の要求が強くなり、エンジン […]-
 岩崎 有平
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(2)社会の変化と技術トレンド
社会の変化 2020年代に入り、自動車制御は大きく変わった。自動運転の進展が大きな要因だ。条件付きで自動運転を可能とする自動運転レベル3や、無人運転を可能にする自動運転レベル4が登場した(表1)。自動運転レベルの基準は米 […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(3)CAN規格の歴史と概要
CAN 規格の歴史 CAN(Controller Area Network)は、、1983年にBosch社が開発した通信プロトコルだ。1986年に公式発表され、1987年に販売を開始した。CAN は数度に渡り規格が改定さ […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(4)CANのマルチマスタとシングルマスタ
CAN は、複数のマスタノードが1組のバスラインに接続される「マルチマスタ」方式だ。全てのノードはバス接続され、送信データを全ノードが共有する。マルチマスタ方式は、平等にバスにアクセスでき、バスに空きがあればどのノードも […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(5)CAN 通信手順とCSMA/CR 衝突時の調停
CAN には、データフレーム/リモートフレーム/オーバーロードフレーム/エラーフレームの4種類のフレームタイプがある。データフレームには標準フォーマットと拡張フォーマットの2種類がある。両者の違いは、識別コード(ID)の […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(6)CAN 通信手順とフレーム構造
CAN には、データフレーム/リモートフレーム/オーバーロードフレーム/エラーフレームの4 種類のフレームタイプがある(表1)。 名称概要データフレーム通常のデータ送信フレーム(標準/拡張フォーマット)リモートフレームデ […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(7)CAN 通信手順とエラー処理
車載ネットワークは、オフィスネットワークに比べ格段に環境条件が厳しい。CAN は平衡伝送方式で比較的ノイズに強いが、GND は不安定で電気的にも厳しい環境だ。障害発生時も、ネットワーク全体を停止させることは危険だ。一部の […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(8)CAN ハードウェア
40年前の技術の影響 40年前に開発された CAN の仕様は、当時の技術を強く反映している。当時のマイクロプロセッサは、 8ビット処理でクロックも4MHzや8MHz 程度であった。メモリーも非常に高価で容量も4キロバイト […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(10)LIN ハードウェア
トポロジ ネットワークに接続する通信機器を「ノード」と呼び、複数のノードを相互接続しネットワークを構成する方法を「トポロジ」と呼ぶ。車載ネットワークでは、ECU( Electronic Control Unit )がノー […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(9)LINの規格概要
LIN規格 LIN(Local Interconnect Network)は、車載ネットワークのコストダウンを目的に、LIN コンソーシアムで策定された通信規格だ。LIN コンソーシアムは、欧州の自動車メーカや半導体メー […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(11)LIN 通信手順
マスタタスクとスレーブタスク LIN は1つのマスタノードと複数のスレーブノードで構成され、唯一のマスタノードが、ネットワーク全体の通信を制御する方式だ。ネットワーク上での衝突や調停(Arbitration)をなくし、低 […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(12)LINのフレーム構造
LIN フレームは、マスタタスクが送信する「ヘッダ」部と、スレーブタスクが送信する「レスポンス」部で構成される(図1)。ヘッダ部は次の5つで構成される。 (1) Break fieldフレームの区切り(13ビット以上)( […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(13)LINの節電機能・エラー処理・発振子
節電機能 車載ネットワークでは「節電」は重要なテーマだ。限られたバッテリー電力と発電量の範囲内で動作しなければならない。LIN は限られた電力を有効に使うため、「ネットワーク管理」として Sleep と Wake Up […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(1)車載 Ethernet 物理層
概要 Ethernet を底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(2)SPE( Single twisted Pair Ethernet )
SPE( Single twisted Pair Ethernet ) 従来の汎用 Ethernet は、RJ45 コネクタと 2対または 4対の UTP ケーブルで機器間を 1対1 接続するトポロジを採用している。車載 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(3)物理層規格
解説対象規格 Ethernet は40年以上に渡り規格が追加・修正された歴史がある。10Mbps の 10BASE5 から始まり、400Gbpsまで拡張されている。車載ネットワークを対象とする 10Mbps から1000 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(4)「10BASE-T1S」 概要
10BASE-T1 登場の背景 汎用 Ethernet はオフィス、産業分野や通信キャリアで広く使われている業界標準の通信規格だ。パソコンやプリンタなどの機器にも標準実装されている。技術的にも完成し最も低価格な通信方式の […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(5)「10BASE-T1S」 4B5B/DME/PAM2 変換 / フレーム構造
4B5B/DME/PAM2 変換 汎用 Ethernet の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有する方式のため、信号の衝突を避けるた […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(6)「10BASE-T1S」 PLCA
PLCA 10BASE-T1S のマルチドロップ環境(Mixing Segment)では、複数ノードが半 2重通信でバス接続される。複数のノードが同時に通信を開始しようとした場合に衝突回避のため、衝突回避機能 PLCA( […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(7)「100BASE-T1 」概要
100BASE-T1 登場の背景 永年に渡り車載ネットワークの主役は CAN だ。2012年に CAN FD が公開されるまでは、CAN の伝送速度は 1Mbps だった。2002年に CAN より高速な FlexRay […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(8)「100BASE-T1 」4B3B/3B2T/PAM3 変換 / フレーム構造
4B3B/3B2T/PAM3 変換 初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有するバス方式のため信号の衝突を避けるためにはデータを送 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(9)「100BASE-T1 」スクランブラ
スクランブラ スクランブラは、100BASE-T1 が動作時にコネクタやケーブルから放射する妨害波(EMI)を抑えるために実装された機能だ。電磁妨害波が他の機器の誤動作を引き起こすため、米国の FCC や日本の VCCI […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(10)「1000BASE-T1」概要
1000BASE-T1 登場の背景 2015年に 100BASE-T1 の標準化が完了したが、当時から 100Mbps では帯域不足との指摘があった。主な理由はカメラ映像の伝送だ。既に実用化された 100BASE-T1 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(11)「1000BASE-T1」符号変換の概要 80B81B / RS FEC
初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは1本の伝送路を複数ノードで共有するバス方式のため、信号の衝突を避けるにはデータを送信していない期間を無信号にする必要がある […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(12)「1000BASE-T1」符号変換 スクランブル/3B2T/PAM3 変換
3B2T/PAM3 次に、3B2T/PAM3 変換の手順を説明する。 「図1 1000BASE-T1 符号化処理」は、3B2T/PAM3 の一連の信号変換の例だ。伝送クロックは 750MHz で、GMII の 125MH […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(13)「1000BASE-T1」OAM / フレーム構造 / 上位層制約事項
OAM OAM(Operation / Administration / Maintenance)は、送信側 PHY と受信側 PHY がお互いの PHY リンクの健全性ステイタスを交換するために使用する。OAM は 1 […]-
岩崎 有平
-