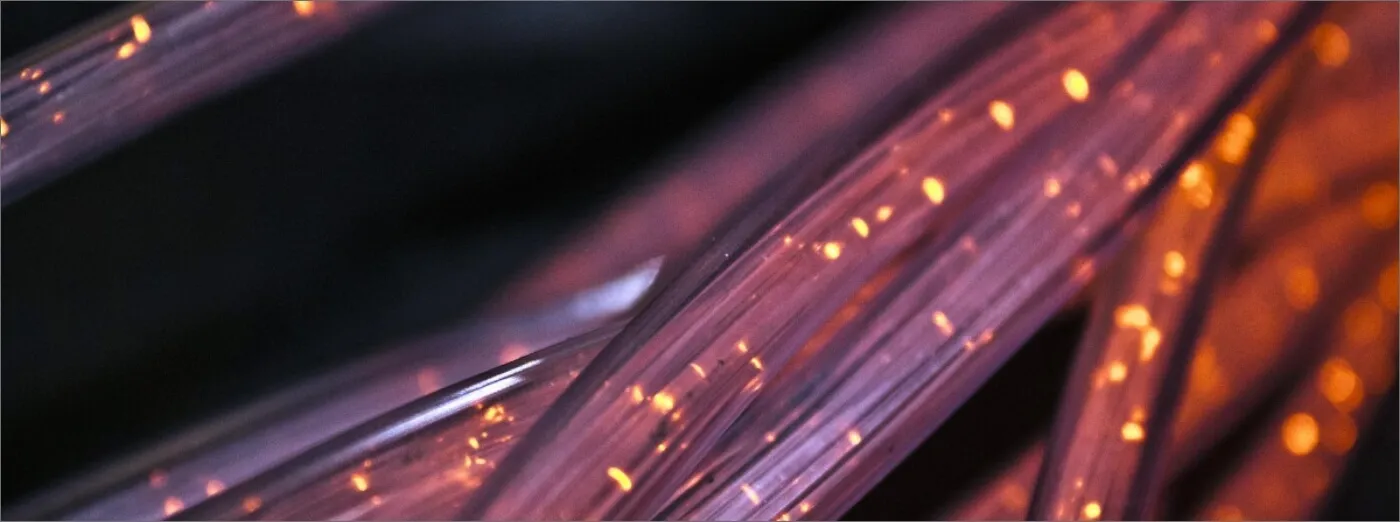
LIN フレームは、マスタタスクが送信する「ヘッダ」部と、スレーブタスクが送信する「レスポンス」部で構成される(図1)。ヘッダ部は次の5つで構成される。
| (1) Break field | フレームの区切り(13ビット以上) |
| (2) Break delimiter | 次の Sync byte field 検出用区切り(1ビット以上) |
| (3) Sync byte field | スレーブノードがクロック同期をとる領域(10ビット) |
| (4) Inter-Byte Space | 次の Protected identifier field 検出用区切り(0ビット以上) |
| (5) Protected identifier field | スレーブタスク指定(10ビット) |
「ヘッダ」部の最小長は34ビット(13+1+10+0+10=34)で、最大長は最小長に40%マージンを加えた値となる(34×1.4=47.6ビット)となる。上記の(1)から(5)までの長さが、47.6ビット時間に収まる必要がある。「Break field 13ビット以上」はマスタが送信する際の決まりで、スレーブ側での検出は、11ビット時間あれば検出ができる。このため、マスタ側の送信が13ビット長よりも若干短くなっても、マスタ⇔スレーブ間の通信が可能だ。マスタとスレーブのクロック精度の差などの要因を加味した柔軟な仕組みだ。
スレーブタスクが送信する「レスポンス」部は 1 ~ 8 バイトのデータで構成する。データの数はあらかじめ決めておく必要がある。
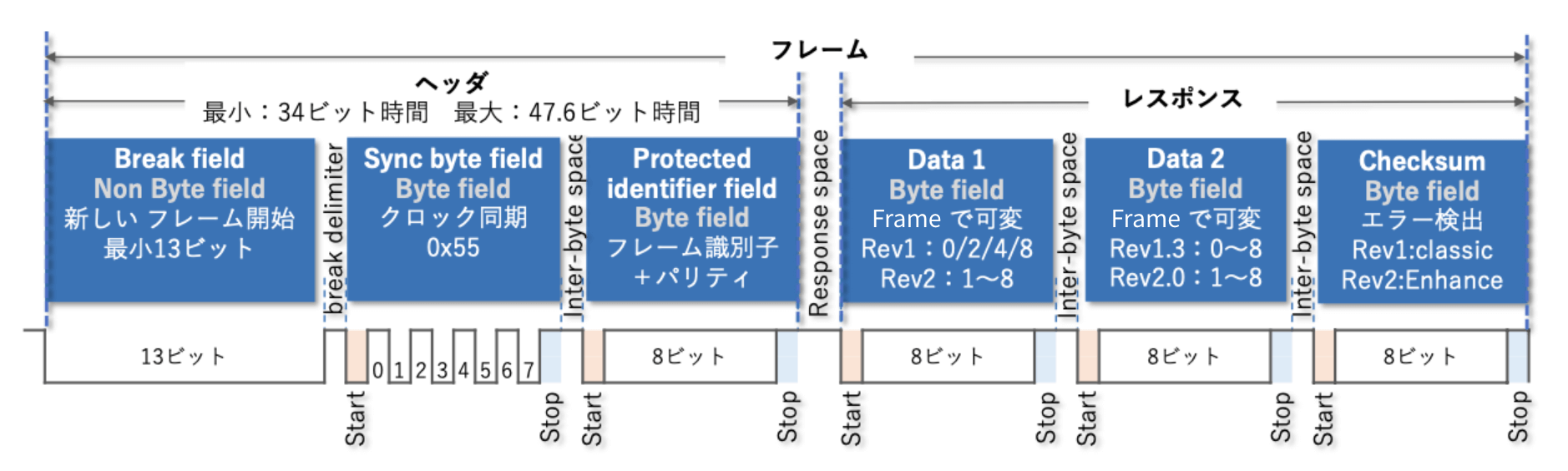
ヘッダとレスポンスを構成する各部は、基本的に図2 「バイトフィールド」と呼ぶ 8 ビットデータでできているが、 Break field はこのルールから外れ、13 ビット以上のドミナントで構成する。
各領域の間は、「break delimiter」「Inter-byte space」「Response space」などの区切りビットが入る。
ヘッダ
Break Field
Break Field は、新しいフレームが始まったことを示す。Byte Field フォーマット(図2)に従わない唯一のフィールドで、常にマスタが送信し、少なくとも13ビット長の「ドミナント」の後に、Break Delimiter が続く。Break Delimiter は1ビット以上の長さが必要。
Sync Byte Field
Sync Byte Field は、マスタが送信する Byte Field でデータは 0x55だ。スレーブは、Sync Byte Field の 1/0 の繰り返し波形から受信データの伝送速度を検出し、以降のデータ受信の基準クロックとなる。Sync Byte Field の後には、最小長さ0の Inter-Byte Space が続く。
Protected Identifier Field
Protected Identifier Field は、2つのサブフィールドで構成される。「フレーム識別」と「パリティ」だ。フレーム識別用に 6 ビットが割り当てられ、0 ~ 63 の範囲を使用でき、次の3つのカテゴリがある。
| 0 ~ 59 (0x3B) | 信号用 |
| 60 (0x3C)/ 61 (0x3D) | 診断とコンフィグ用 |
| 62 (0x3E)/63 (0x3F) | 予約(拡張用) |
Parity は、図3 の様に割り当てられ、計算式は次式だ。
- P0 = ID0 + ID1 + ID2 + ID4
- P1 = (ID1 + ID3 + ID4 + ID5)
Rev 1.x には、ID4 と ID5 で 64 個のフレーム識別のセットを、それぞれ 2/4/8 個のデータフィールドを持つ 16 個の識別子の 4 つのサブセットに分割するオプションがある。

Data
1 ~ 8 バイトデータを伝送できる。
Checksum
フレームの最後のフィールドが Checksum だ。Rev 2x では、 Protected Identifier Field と Data が計算の対象で「 enhanced checksum 」、Rev 1x では Data のみが計算の対象 で「 classic checksum 」と呼ぶ。バージョンにより互換性がないので注意が必要だ。
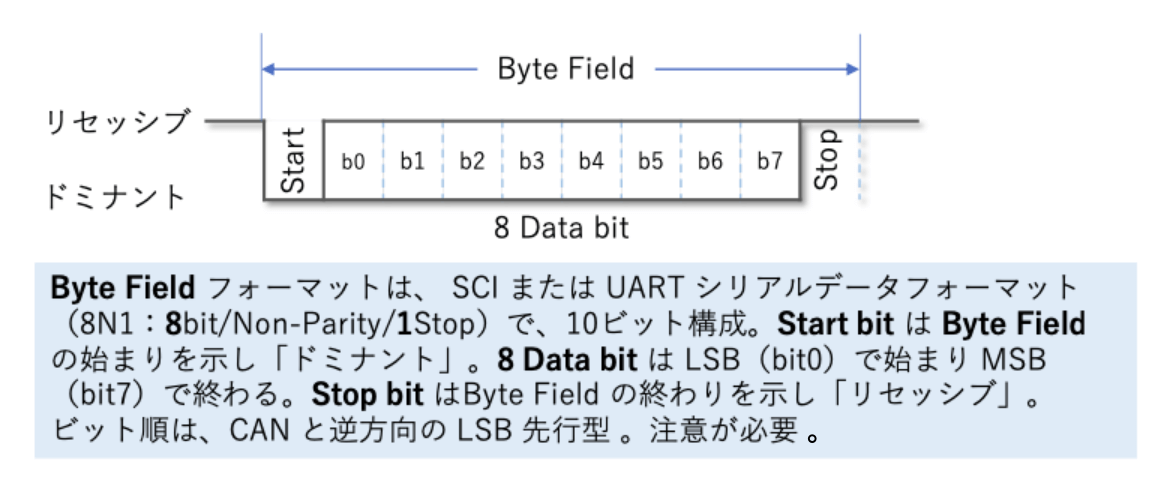
送信ノードはチェックサムを計算し、 Checksum 領域に書き込む。Checksum の生成は8ビットデータを加算し、キャリーは LSB に加算する。全ての加算結果の逆数がChecksum Field(図4) に書き込まれる。受信ノードは受信データを順次加算し、最後に Checksum を加算した結果が「0xFF」になればデータが正しく受信できたと判断する。0xFF でない場合は、エラーが発生したと判断し、データを廃棄する。計算方法は、図5 の例を参照いただきたい。この例は、次の4 バイトを順次加算し、キャリーがあれば LSB(最下位)に加算する。最終加算結果を反転したものが「Checksum」になる。この例は、「LIN Specification Package Revision 2.2A」を引用している。
- 0x4A/0x55/0x93/0xE5

車載ネットワーク
-
 4.車載ネットワーク
4.車載ネットワーク
車載ネットワーク(1)変遷
自動車の基本的な機能(走る・曲がる・止まるなど)は、機械や油圧などの機能ごとの比較的単純な制御だった。アクセルペダルを踏めば加速し、ブレーキペダルを踏めば車が止まる。排ガス規制やエンジン高性能化の要求が強くなり、エンジン […]-
 岩崎 有平
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(2)社会の変化と技術トレンド
社会の変化 2020年代に入り、自動車制御は大きく変わった。自動運転の進展が大きな要因だ。条件付きで自動運転を可能とする自動運転レベル3や、無人運転を可能にする自動運転レベル4が登場した(表1)。自動運転レベルの基準は米 […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(3)CAN規格の歴史と概要
CAN 規格の歴史 CAN(Controller Area Network)は、、1983年にBosch社が開発した通信プロトコルだ。1986年に公式発表され、1987年に販売を開始した。CAN は数度に渡り規格が改定さ […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(4)CANのマルチマスタとシングルマスタ
CAN は、複数のマスタノードが1組のバスラインに接続される「マルチマスタ」方式だ。全てのノードはバス接続され、送信データを全ノードが共有する。マルチマスタ方式は、平等にバスにアクセスでき、バスに空きがあればどのノードも […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(5)CAN 通信手順とCSMA/CR 衝突時の調停
CAN には、データフレーム/リモートフレーム/オーバーロードフレーム/エラーフレームの4種類のフレームタイプがある。データフレームには標準フォーマットと拡張フォーマットの2種類がある。両者の違いは、識別コード(ID)の […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(6)CAN 通信手順とフレーム構造
CAN には、データフレーム/リモートフレーム/オーバーロードフレーム/エラーフレームの4 種類のフレームタイプがある(表1)。 名称概要データフレーム通常のデータ送信フレーム(標準/拡張フォーマット)リモートフレームデ […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(7)CAN 通信手順とエラー処理
車載ネットワークは、オフィスネットワークに比べ格段に環境条件が厳しい。CAN は平衡伝送方式で比較的ノイズに強いが、GND は不安定で電気的にも厳しい環境だ。障害発生時も、ネットワーク全体を停止させることは危険だ。一部の […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(8)CAN ハードウェア
40年前の技術の影響 40年前に開発された CAN の仕様は、当時の技術を強く反映している。当時のマイクロプロセッサは、 8ビット処理でクロックも4MHzや8MHz 程度であった。メモリーも非常に高価で容量も4キロバイト […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(10)LIN ハードウェア
トポロジ ネットワークに接続する通信機器を「ノード」と呼び、複数のノードを相互接続しネットワークを構成する方法を「トポロジ」と呼ぶ。車載ネットワークでは、ECU( Electronic Control Unit )がノー […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(9)LINの規格概要
LIN規格 LIN(Local Interconnect Network)は、車載ネットワークのコストダウンを目的に、LIN コンソーシアムで策定された通信規格だ。LIN コンソーシアムは、欧州の自動車メーカや半導体メー […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(11)LIN 通信手順
マスタタスクとスレーブタスク LIN は1つのマスタノードと複数のスレーブノードで構成され、唯一のマスタノードが、ネットワーク全体の通信を制御する方式だ。ネットワーク上での衝突や調停(Arbitration)をなくし、低 […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(12)LINのフレーム構造
LIN フレームは、マスタタスクが送信する「ヘッダ」部と、スレーブタスクが送信する「レスポンス」部で構成される(図1)。ヘッダ部は次の5つで構成される。 (1) Break fieldフレームの区切り(13ビット以上)( […]-
岩崎 有平
-
-
4.車載ネットワーク
車載ネットワーク(13)LINの節電機能・エラー処理・発振子
節電機能 車載ネットワークでは「節電」は重要なテーマだ。限られたバッテリー電力と発電量の範囲内で動作しなければならない。LIN は限られた電力を有効に使うため、「ネットワーク管理」として Sleep と Wake Up […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(1)車載 Ethernet 物理層
概要 Ethernet を底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(2)SPE( Single twisted Pair Ethernet )
SPE( Single twisted Pair Ethernet ) 従来の汎用 Ethernet は、RJ45 コネクタと 2対または 4対の UTP ケーブルで機器間を 1対1 接続するトポロジを採用している。車載 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(3)物理層規格
解説対象規格 Ethernet は40年以上に渡り規格が追加・修正された歴史がある。10Mbps の 10BASE5 から始まり、400Gbpsまで拡張されている。車載ネットワークを対象とする 10Mbps から1000 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(4)「10BASE-T1S」 概要
10BASE-T1 登場の背景 汎用 Ethernet はオフィス、産業分野や通信キャリアで広く使われている業界標準の通信規格だ。パソコンやプリンタなどの機器にも標準実装されている。技術的にも完成し最も低価格な通信方式の […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(5)「10BASE-T1S」 4B5B/DME/PAM2 変換 / フレーム構造
4B5B/DME/PAM2 変換 汎用 Ethernet の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有する方式のため、信号の衝突を避けるた […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(6)「10BASE-T1S」 PLCA
PLCA 10BASE-T1S のマルチドロップ環境(Mixing Segment)では、複数ノードが半 2重通信でバス接続される。複数のノードが同時に通信を開始しようとした場合に衝突回避のため、衝突回避機能 PLCA( […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(7)「100BASE-T1 」概要
100BASE-T1 登場の背景 永年に渡り車載ネットワークの主役は CAN だ。2012年に CAN FD が公開されるまでは、CAN の伝送速度は 1Mbps だった。2002年に CAN より高速な FlexRay […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(8)「100BASE-T1 」4B3B/3B2T/PAM3 変換 / フレーム構造
4B3B/3B2T/PAM3 変換 初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有するバス方式のため信号の衝突を避けるためにはデータを送 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(9)「100BASE-T1 」スクランブラ
スクランブラ スクランブラは、100BASE-T1 が動作時にコネクタやケーブルから放射する妨害波(EMI)を抑えるために実装された機能だ。電磁妨害波が他の機器の誤動作を引き起こすため、米国の FCC や日本の VCCI […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(10)「1000BASE-T1」概要
1000BASE-T1 登場の背景 2015年に 100BASE-T1 の標準化が完了したが、当時から 100Mbps では帯域不足との指摘があった。主な理由はカメラ映像の伝送だ。既に実用化された 100BASE-T1 […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(11)「1000BASE-T1」符号変換の概要 80B81B / RS FEC
初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは1本の伝送路を複数ノードで共有するバス方式のため、信号の衝突を避けるにはデータを送信していない期間を無信号にする必要がある […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(12)「1000BASE-T1」符号変換 スクランブル/3B2T/PAM3 変換
3B2T/PAM3 次に、3B2T/PAM3 変換の手順を説明する。 「図1 1000BASE-T1 符号化処理」は、3B2T/PAM3 の一連の信号変換の例だ。伝送クロックは 750MHz で、GMII の 125MH […]-
岩崎 有平
-
-
4.車載ネットワーク
基礎から学ぶ車載 Ethernet 技術(13)「1000BASE-T1」OAM / フレーム構造 / 上位層制約事項
OAM OAM(Operation / Administration / Maintenance)は、送信側 PHY と受信側 PHY がお互いの PHY リンクの健全性ステイタスを交換するために使用する。OAM は 1 […]-
岩崎 有平
-