概要
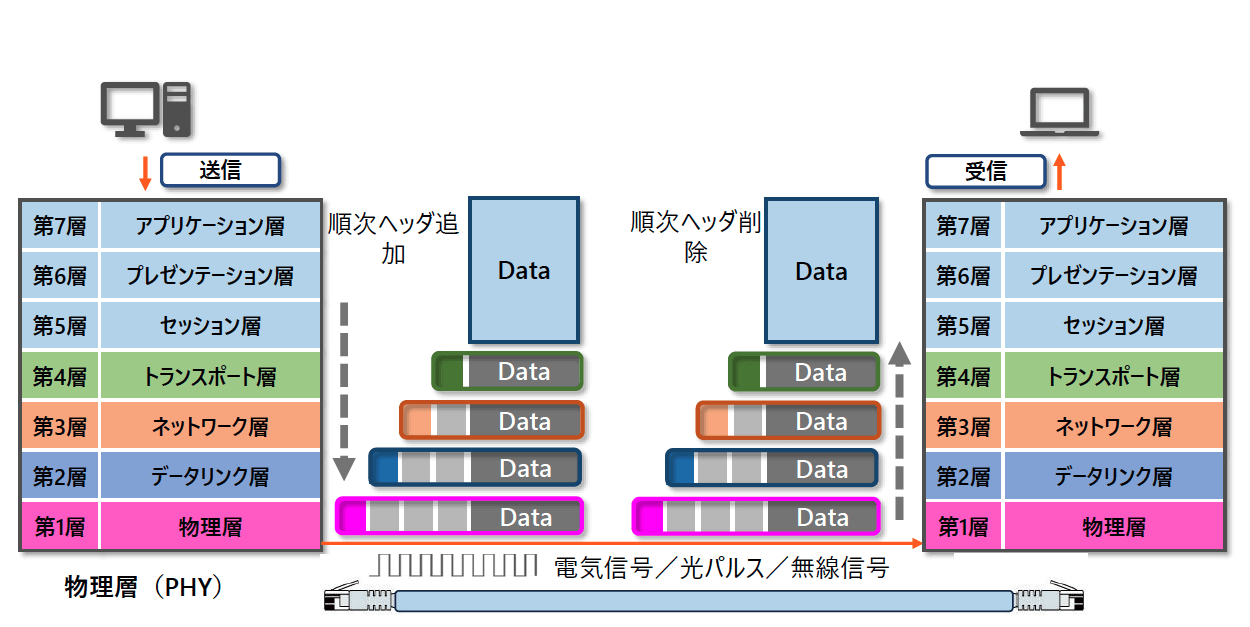
Ethernet を底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最下層の物理層を切り離すことで、データ形式や経路制御を一切変えず、伝送速度を変えたり伝送媒体や伝送距離を変えることができる。車載 Ethernet も従来の汎用 Ethernet と考え方は変わらない。
今回はこの車載物理層( 「図1 OSI 階層構造・物理層の範囲」 )の仕組みを解説する。車載 Ethernet 物理層は、伝送速度/伝送距離/伝送媒体により様々な規格が存在するが、10Mビット/秒~1Gビット/秒の規格を対象に話を進める。物理層規格の主な対象は「信号」 「ケーブル」 「コネクタ」だが、ケーブルやコネクタ規格は IEEE の範疇ではなく、IEC 等の規格化団体や業界団体が取りまとめるため、両者の共同作業になっている。また、論理層と物理層をつなぐ xMII インタフェースには全く変更がない。
車載ネットワークの変遷
「図2 車載ネットワーク技術」は、1980年代から現在までの車載ネットワークの変化だ。1980年代に自動車各社が独自の車載ネットワークを採用したが、Bosch社が提唱した CAN に集約した。CAN に集約した理由は技術的な優位性と1チップ当り数セントと言われるかなり安いライセンス料も影響したようだ。現在でも CAN は自動車制御の主役として広く普及している。エンジン制御やブレーキ制御などの確実性や安全性を求められる領域には CAN を使用するが、安全性にさほど影響を与えないワイパー制御やウィンドウ制御には低価格な LIN が使われている。
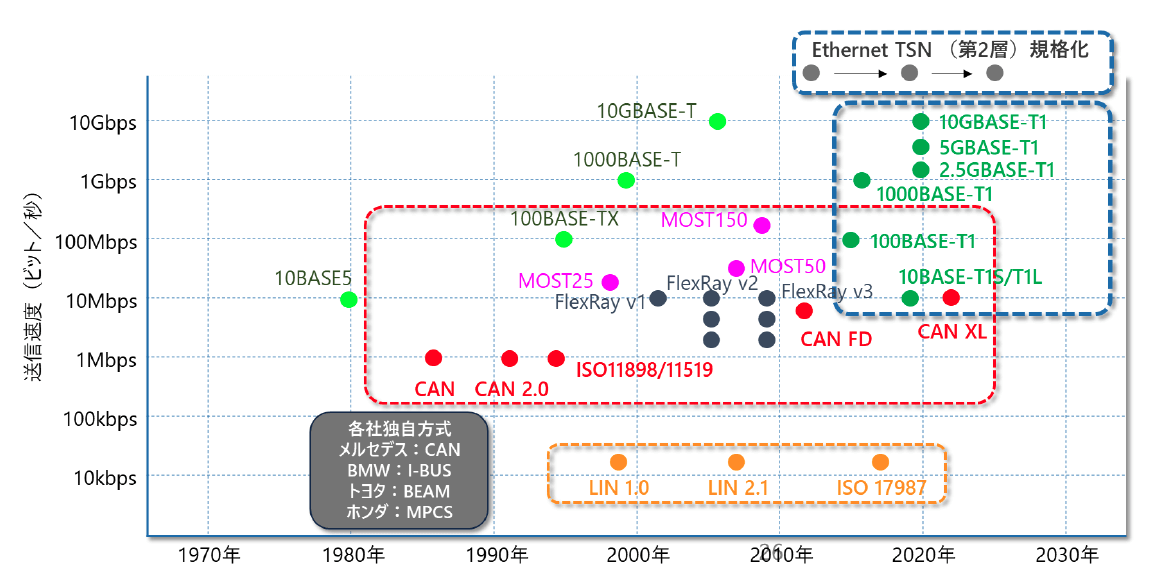
2000年代になると CAN を超える高速性と堅牢性を備えた FlexRay が登場する。ヨーロッパ系の車にはかなり採用されたが、日本車での採用例は少ない。CAN に比べ通信速度は速いが 10Mbps に過ぎず、現在の ADAS(Advanced Driving Assistant System:先進運転支援システム)等の要求を満たすことはできない。少し残念な点は FlexRay は高速化を目指さず、低コスト/低速化に向かったことだ。
CAN/LIN/FlexRay はエンジンや車体などの制御機器をつなぐネットワークだが、DVD やカーナビなどのインフォテインメント系を接続する MOST( Media Oriented Systems Transport)が 1990年代に登場した。MOST は 25Mbps の伝送速度を持つ MOST25 から始まり、MOST50/MOST150 と高速化した。インフォテインメント系の通信には十分な帯域があり申し分ない。しかし、映像リソースの共有化等のため、Ethernet との相互接続や IP パケット対応を進めたことが Ethernet への置き換えを促す皮肉な結果を招いた。自動車分野でしか使われない MOST ではなく「汎用品で低価格な Ethernet に置き換える」動きを引き起こすことになる。
2012年以降 Ethernet TSN の規格化が始まり、第2層の規格は 2019年で一段落し現在も拡張作業が続いている。第1層(物理層)規格 SPE( Single twisted Pair Ethernet )の審議も同時期に始まった。既に 10Mbps/100Mbps/1000Mbps の物理層は規格化が完了し関連製品や部品の供給もすでに始まっている。BMW、メルセデス、日産、トヨタが車載 Ethernet を搭載した車を既に出荷している。
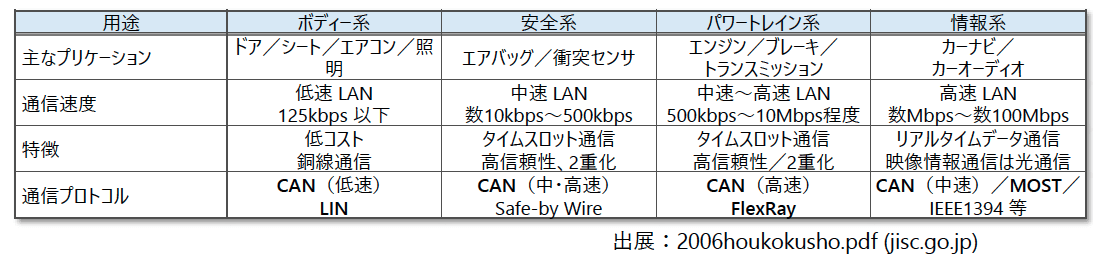
「表1 各用途に適した通信プロトコルの特徴」は、平成18年度(2006年)に発表された「平成18年度 標準化経済性研究会 報告書」の自動車用途別通信プロトコル一覧だ。車載 Ethernet 登場前の状態は、CAN が用途に関わらず広範囲に使われ、低価格だが信頼性を必要としないボディー系には LIN が広く使われている。エアバッグは応答時間に厳しい規制があるため、一般的には Safe-by Wire を使用する。パワートレイン系に FlexRay 、インフォテインメント系には MOST が使われている。
車載物理層規格化動向
車載ネットワークは、IEEE802.1 の「Time Sensitive Networking Task Group」が開発中の第2層プロトコル群(Ethernet TSN)と IEEE802.3 第1層(物理層)規約で構成されている。TSN タスクグループは、2012年11月に AVB タスクグループ(Audio Video Bridging Task Group)の作業を引き継ぐ形で発足した。TSN タスクグループは 2012年から AVB タスクグループが作成した第2層プロトコル群の強化と新たなプロトコル作成を行い、2019年に主な作業を完了した。現在も追加開発を継続し、プロトコル群の完成は2025年頃ではないかと言われている。第1層(物理層) SPE 規約も 2012年から始まり、現在も拡張作業が続いている。
Ethernet TSN の主なターゲット市場は車載ネットワークと IoT ネットワークだ。しかし、TSN タスクグループ発足当時に自動車業界からの強い要請があり、車載関連規格が先行開発された。この方針は第2層のプロトコル群に留まらず、第1層(物理層)の開発に大きな影響を与えた。2019年に規格化された「10BASE-T1L」は IoT ネットワークがターゲットだが、これ以外は全て車載ネットワーク用途が狙いだ。「図3 Ethernet TSN 物理層規格」は第2層プロトコル群と第1層(物理層)規約の審議期間だ。物理層規約の青色が Study Group と呼ばれる事前調査期間で、緑色が Task Force と呼ばれる規格審議の期間だ。
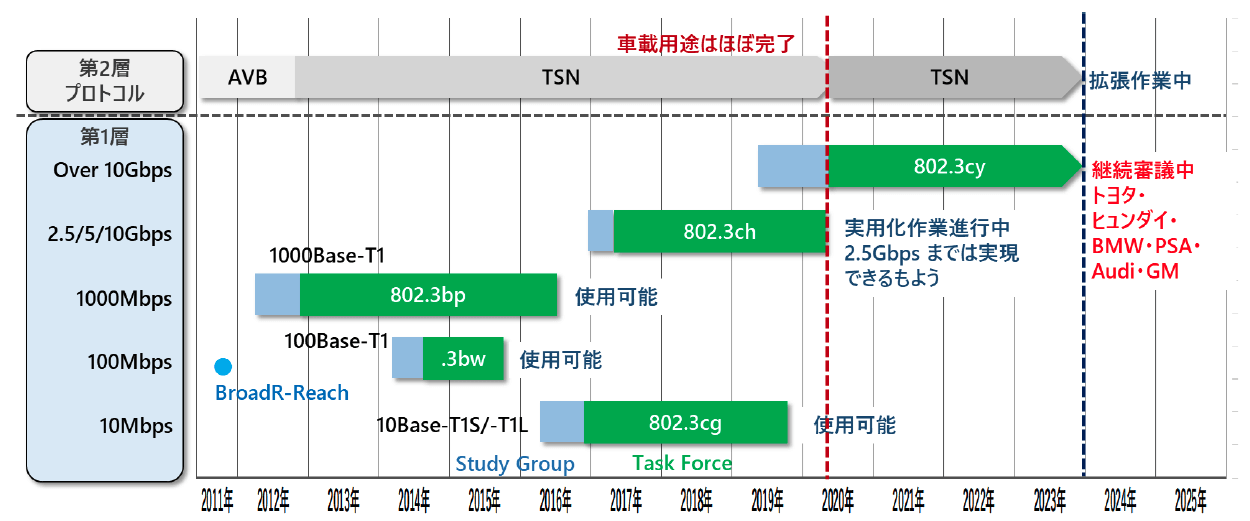
「図3 Ethernet TSN 物理層規格」を見ると不思議なことが起きていることが分かる。100BASE-T1 は既に Broadcom 社が2011年に開発を完了した BroadR-Reach をほぼそのまま採用している。しかし、IEEE で規格化作業が始まったのは2年後の2014年だ。100BASE-T1 の規格化を後回しに、1000BASE-T1 の規格化作業を先行している。結果として 1000BASE-T1 は100BASE-T1 の約半年遅れで規格化作業を完了している。この辺りからも IEEE は 1000Mbps(1000BASE-T1)を重視していたことが伺える。
その後、10BASE-T1S 規格が 2019年に規格化を終えた。この規格は明らかに現在主流の車載ネットワーク規格である CAN と LIN の置き換えを狙った規格だ。更に、2.5G/5G/10G の車載ネットワーク規格を短期間で仕上げている。車載ネットワークの当面の主役は 1000Mbps(=1Gbps)だが、近い将来マルチギガに移行することを想定した作業だ。マルチギガの規格化は完了しているが、実現技術が追い付かない面もあり、実用化には今しばらく時間が必要だ。
このような動きから判断し、IEEE は現在要求がある 10Mbps/100Mbps/1000Mbps はもちろん将来の Over10G を含むマルチギガ対応にも応える準備を進めている。また、現在主流の CAN/LIN を 10BASE-T1S で置き換え、車載ネットワークを全て「Ethernet」に置き換える作戦を展開しているようだ。
車載 Ethernet 物理層の課題
車載 Ethernet 物理層の重要課題は、既存の CAN/LIN を遥かに凌ぐ「高速通信」の実現と「ワイヤーハーネスの軽量化・省スペース化」だ。
自動車の情報処理システムは、カーナビや DVD 再生などのインフォテインメント・ADAS(Advanced Driving Assistant System:先進運転支援システム)・エンジン/車体制御が複雑化し多数の ECU(Electronic Control Unit:電子制御装置)で制御されている。現在の自動車では、これらの様々な ECU 間でリアルタイムにデータを共有する必要がある。必然的にデータ量の増加と共有時間短縮のため、ECU 間を接続する高速通信ネットワークが不可欠になる。
最初に規格化を完了した 100BASE-T1 は、Broadcom社が開発した BroadR-Reach をほぼそのまま採用している。BroadR-Reach が開発された当時は、 AVB タスクグループの活動時期と重なる。100BASE-T1 は音声や映像などを扱う車内インフォテインメント系には十分な性能と機能を備えているが、ADAS やエンジン/車体制御には十分ではなかった。
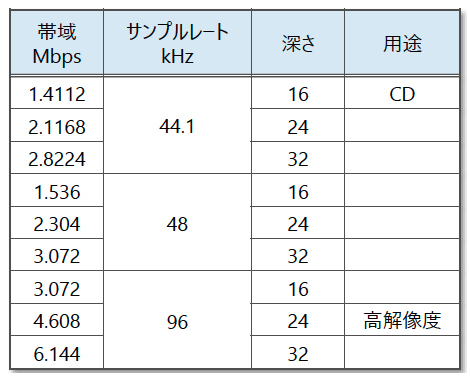
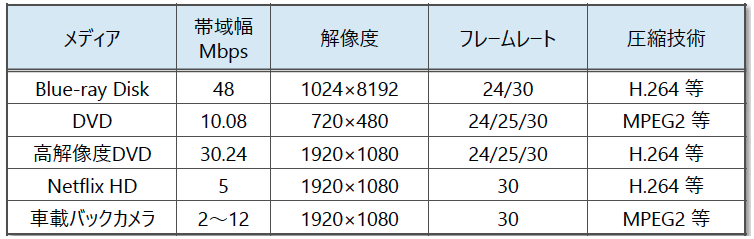
第2層の TSN(当時は AVB)の仕組みと 100BASE-T1 を組み合わせると、車内インフォテインメント系の音声や映像を安定して配信することができる。例えば一般的な CD の帯域は 約 1.4Mbps 、高解像度オーディオの帯域は 4.6Mbps 程度で、100Mbps は十分な帯域だ( 「表2 音声帯域」 )。一般的な DVD や Netflix 等のビデオ配信映像も複数本配信することができる。バックカメラモニタの圧縮映像の配信も可能だ( 「表3 映像帯域」 )。
もう一つの課題はワイヤーハーネスの軽量化と省スペース化だ。自動車のワイヤーハーネスは、自動車1台当たり1000本を超える。ケーブルの総延長は 3km を超え 10km になる車もあり総重量は 50kg にもなる。運転性能の向上や燃費改善には軽量化と省スペース化は重要なテーマだが、自動車の高機能化に伴い増える傾向にある。
初期の自動車にも多くのワイヤーハーネスが使われていた。例えば、ウィンカーやヘッドライトの on/off ケーブルだ。ワイヤーハーネスが増加するきっかけの1つが機械式キャブレターから FI(Fuel Injection:燃料噴射)更に EFI(Electronic Fuel Injection:電子制御燃料噴射)に変わり、ECU( Electronic Control Unit:電子制御装置)が車に搭載されたことだ。富士キメラ総研の調査では、自動車1台当たりの ECU 平均搭載数は 2021年に 29.6 個、2035年には 46.6個に増えると予想している。
IEEE802.3 委員会での自動車業界の要求は、1対(2本)のUTP(Unshielded Twisted Pair:非シールド撚対線)で通信ができることと、通信線(UTP)を使い電力を供給できることだ。一般的な Ethernet の UTP ケーブルは 50Ω だが、車載 Ethernet では 100Ω の UTP を採用している。この結果、汎用 Ethernet UTP ケーブルの約半分の重量になっている。通信線を使い給電することで、 ECU 等への電源線を削除することができる。ケーブルの軽量化と電源線の削減で、ワイヤーハーネスの重量削減にかなり貢献できる仕様を実現している。
基礎から学ぶ車載 Ethernet
-
 4-4.基礎から学ぶ車載 Ethernet 技術
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(1)車載 Ethernet 物理層
概要 Ethernet を底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最 […]-
 岩崎 有平
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(2)SPE( Single twisted Pair Ethernet )
SPE( Single twisted Pair Ethernet ) 従来の汎用 Ethernet は、RJ45 コネクタと 2対または 4対の UTP ケーブルで機器間を 1対1 接続するトポロジを採用している。車載 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(3)物理層規格
解説対象規格 Ethernet は40年以上に渡り規格が追加・修正された歴史がある。10Mbps の 10BASE5 から始まり、400Gbpsまで拡張されている。車載ネットワークを対象とする 10Mbps から1000 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(4)「10BASE-T1S」 概要
10BASE-T1 登場の背景 汎用 Ethernet はオフィス、産業分野や通信キャリアで広く使われている業界標準の通信規格だ。パソコンやプリンタなどの機器にも標準実装されている。技術的にも完成し最も低価格な通信方式の […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(5)「10BASE-T1S」 4B5B/DME/PAM2 変換 / フレーム構造
4B5B/DME/PAM2 変換 汎用 Ethernet の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有する方式のため、信号の衝突を避けるた […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(6)「10BASE-T1S」 PLCA
PLCA 10BASE-T1S のマルチドロップ環境(Mixing Segment)では、複数ノードが半 2重通信でバス接続される。複数のノードが同時に通信を開始しようとした場合に衝突回避のため、衝突回避機能 PLCA( […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(7)「100BASE-T1 」概要
100BASE-T1 登場の背景 永年に渡り車載ネットワークの主役は CAN だ。2012年に CAN FD が公開されるまでは、CAN の伝送速度は 1Mbps だった。2002年に CAN より高速な FlexRay […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(8)「100BASE-T1 」4B3B/3B2T/PAM3 変換 / フレーム構造
4B3B/3B2T/PAM3 変換 初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有するバス方式のため信号の衝突を避けるためにはデータを送 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(9)「100BASE-T1 」スクランブラ
スクランブラ スクランブラは、100BASE-T1 が動作時にコネクタやケーブルから放射する妨害波(EMI)を抑えるために実装された機能だ。電磁妨害波が他の機器の誤動作を引き起こすため、米国の FCC や日本の VCCI […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(10)「1000BASE-T1」概要
1000BASE-T1 登場の背景 2015年に 100BASE-T1 の標準化が完了したが、当時から 100Mbps では帯域不足との指摘があった。主な理由はカメラ映像の伝送だ。既に実用化された 100BASE-T1 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(11)「1000BASE-T1」符号変換の概要 80B81B / RS FEC
初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは1本の伝送路を複数ノードで共有するバス方式のため、信号の衝突を避けるにはデータを送信していない期間を無信号にする必要がある […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(12)「1000BASE-T1」符号変換 スクランブル/3B2T/PAM3 変換
3B2T/PAM3 次に、3B2T/PAM3 変換の手順を説明する。 「図1 1000BASE-T1 符号化処理」は、3B2T/PAM3 の一連の信号変換の例だ。伝送クロックは 750MHz で、GMII の 125MH […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(13)「1000BASE-T1」OAM / フレーム構造 / 上位層制約事項
OAM OAM(Operation / Administration / Maintenance)は、送信側 PHY と受信側 PHY がお互いの PHY リンクの健全性ステイタスを交換するために使用する。OAM は 1 […]-
岩崎 有平
-