PLCA
10BASE-T1S のマルチドロップ環境(Mixing Segment)では、複数ノードが半 2重通信でバス接続される。複数のノードが同時に通信を開始しようとした場合に衝突回避のため、衝突回避機能 PLCA(PHY Level Collision Avoidance)を実装している。PLCA は従来の CSMA/CD や TDM(時分割多重)と比較し帯域を有効に活用することが狙いだ。
PLCA はオプションのため実装されないことがある。この場合は、従来型の CSMA/CD で衝突を回避する仕組みになっている。 Mixing Segment は、25m の伝送路と最大 8台までのノード接続をサポートしている。
PLCA 機能は、MDIO 等の管理インタフェースを介して上位の管理デバイスが各ノードに固有の「ID」を設定し、「ID」に基づいて送信機会を順番に与える制御を行う。つまり、Mixing Segment 動作開始前に「ID」を確定し、動作を開始する。稼働中に、動的に「ID」の追加削除変更を行うことはできない。
各ノードの送信機会はラウンドロビン方式で決まり、「ID」 0→1→2 ——– →N→0 の順序で送信権が循環する仕組みだ。各ノードは自分自身が送信権を持っているときのみ送信を開始するることができる( 「図1 送信権循環」 )。
全体を制御する Coordinator(マスターとも言う)には「ID」 0 が与えられ、送信機会は「ID=0」の Coordinator から始まる。
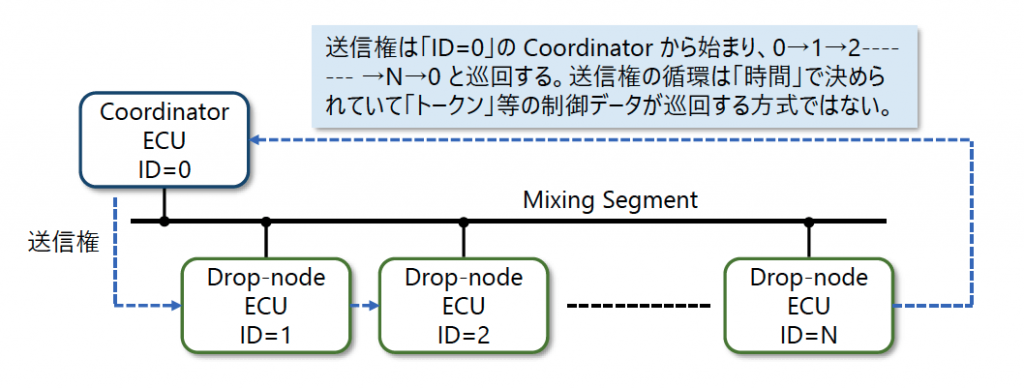
Coordinator は、Beacon と呼ばれる全ノードへの同期信号を送信しタイマー( TO_TIMER )をリセットし PLCA サイクルを開始する。PLCA サイクルは Beacon に続く 0→1→2 ——– →N→0 の順序で各 2μ秒(20 クロックサイクル)の時間幅が設定される。各ノードは自分自身の「ID」と一致する時間帯に送信を開始することができる。 Coordinator は巡回時間を設定するため、事前に全ノード数を知っている必要がある。このノード数も管理インタフェース経由で事前に Coordinator に設定する。 Drop node は全ノード数を知る必要はなく、自分自身の「ID」がわかっているだけでよい。
送信機会を得たノードはフレーム送信を開始する。もちろん、Ethernet は可変長フレームのため送信時間は一定ではない。送信が完了するまでの間、他のノードはタイマー(TO_TIMER)を停止し送信が完了すると再度タイマーを動かすことで時間ずれを防止している。
送信機会を得たがすぐフレーム送信を開始できない場合は、「Commit 信号」を送り他ノードのタイマーを止め、待たせることもできる。
送信機会を得たが送信データがない場合は、特別な動作をせず割り当てられた時間帯をやり過ごす(スキップ)ことになる。この処置を「Yield:ゆずる」と呼ぶ。
Transmit Opportunity Timer 送信制御の基準時計
「図2 PLCA サイクル例」は 2つの PLCA サイクルの例だ。

- PLCA サイクル n
- Coordinator(ID=0)が Beacon を送信しサイクルを開始
- ID=0 から ID=N までの全てのノードは送信データがない(Yield)
- サイクル n+1
- Coordinator(ID=0)が Beacon を送信しサイクルを開始
- ID=0 は送信データがない(Yield)
- ID=1 は送信権を得て、即座にフレーム送信
- ID=2 および ID= 4~n は送信データがない(Yield)
- ID=3 は、Commit で待たせた後、フレーム送信
「図3 タイムスロットとバスサイクル」の様に、PLCA の最小タイムスロットは 2マイクロ秒(20 クロックサイクル)で最大タイムスロットは Commit と最大 Ethernet フレーム送信時間の和になる。Ethernet 最大長フレームは物理層付加部を加えると 1542 バイト(= 12,336 ビット)で 1.2336 ミリ秒になる。
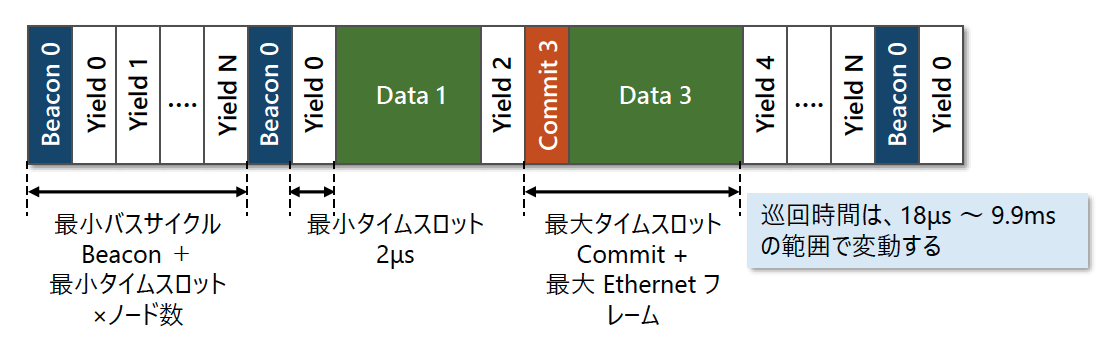
最小バスサイクルは、Beacon + (最小タイムスロット)×(ノード数)になり、18マイクロ秒になる。最大バスサイクルは、Beacon + (最大タイムスロット)×(ノード数)で、約 9.9ミリ秒になる。
PLCA サイクル時間は、送信フレーム大きさと数に大きく変動する方式だ。
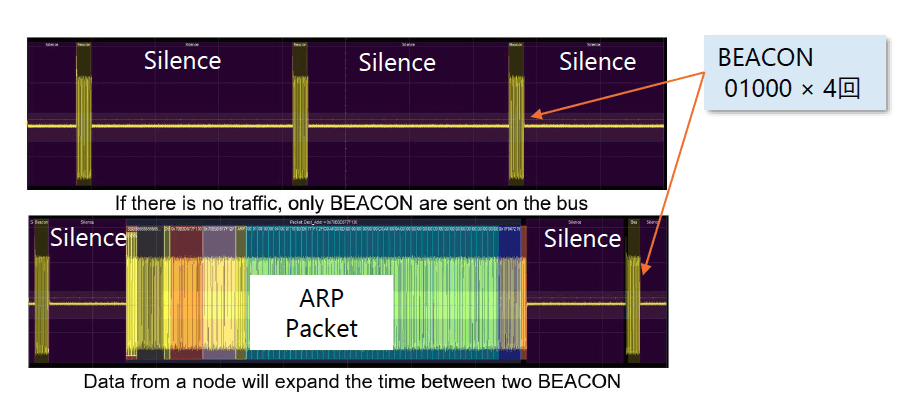
「図14 PLCA 動作例」の上図は、定期的に BEACON が送信され PLCA サイクルが始まるが、送信デバイスが居ない状態だ。BEACON 間は Silence が続く。下図は、1台のノードが送信権を使い送信した例だ。この例では ARP Packet を送信している。
PLCA は送信権が巡回し確実に送信権をとることができる。しかし、送信権の巡回時間は 18マイクロ秒~ 9.9ミリ秒とばらつきが大きい。リアルタイム性があるとはいいがたい。このばらつきが、過去の Token 方式敗退の原因だ。方や CSMA/CD は初期モデルからアルゴリズムは変わっていないが、遅延時間が大きく変わっている。オリジナルの 10BASE5 では、伝送路が 2500m あり、ノード間の最大遅延時間は 46.38マイクロ秒ある。これに対し 10BASE-T1S の伝送路は 25m しかなく、1/100 に過ぎない。ノード間の最大遅延時間も約 約 1/100 になる。当然、衝突確率も 1/100 程度になる。10BASE-T1S の衝突は起きにくく、意外と性能は良いのではないかと思う。衝突が起きなければ、ネットワーク使用効率やレスポンスは PLCA より優れている。今後の自動車業界の動向を注視したいと思う。
PLCA の送信権巡回時間は、最小で 18µ秒、最大で 9.8708m秒と約 3 桁の違いがある。果たしてこれほどのバラツキがある巡回時間を「リアルタイム」と呼ぶのだろうか?
かなり難解で複雑な仕組みを導入した割には、お粗末な結果ではないだろうか? かつて、 同じような送信権巡回アルゴリズムの Token Ring が敗退し、 100VG-Any LAN も敗退した理由はこの辺りにもあった。
30年以上前に、私は 100VG-Any LAN 機器開発と国内の販促責任者だった。複雑で難解な仕組みの割には、リアルタイム性がなく訴求しきれないところがあった。
歴史は繰り返さなければいいがと危惧している。
基礎から学ぶ車載 Ethernet
-
 4-4.基礎から学ぶ車載 Ethernet 技術
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(1)車載 Ethernet 物理層
概要 Ethernet を底辺で支えているのが物理層だ。物理層の基本機能は、0と1で表現されるデジタルデータを電気信号や光パルスに変換し媒体を介して通信することだ。OSI 階層では最下層に相当する。第2層以上の論理層と最 […]-
 岩崎 有平
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(2)SPE( Single twisted Pair Ethernet )
SPE( Single twisted Pair Ethernet ) 従来の汎用 Ethernet は、RJ45 コネクタと 2対または 4対の UTP ケーブルで機器間を 1対1 接続するトポロジを採用している。車載 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(3)物理層規格
解説対象規格 Ethernet は40年以上に渡り規格が追加・修正された歴史がある。10Mbps の 10BASE5 から始まり、400Gbpsまで拡張されている。車載ネットワークを対象とする 10Mbps から1000 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(4)「10BASE-T1S」 概要
10BASE-T1 登場の背景 汎用 Ethernet はオフィス、産業分野や通信キャリアで広く使われている業界標準の通信規格だ。パソコンやプリンタなどの機器にも標準実装されている。技術的にも完成し最も低価格な通信方式の […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(5)「10BASE-T1S」 4B5B/DME/PAM2 変換 / フレーム構造
4B5B/DME/PAM2 変換 汎用 Ethernet の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有する方式のため、信号の衝突を避けるた […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(6)「10BASE-T1S」 PLCA
PLCA 10BASE-T1S のマルチドロップ環境(Mixing Segment)では、複数ノードが半 2重通信でバス接続される。複数のノードが同時に通信を開始しようとした場合に衝突回避のため、衝突回避機能 PLCA( […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(7)「100BASE-T1 」概要
100BASE-T1 登場の背景 永年に渡り車載ネットワークの主役は CAN だ。2012年に CAN FD が公開されるまでは、CAN の伝送速度は 1Mbps だった。2002年に CAN より高速な FlexRay […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(8)「100BASE-T1 」4B3B/3B2T/PAM3 変換 / フレーム構造
4B3B/3B2T/PAM3 変換 初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは、1本の伝送路を複数ノードで共有するバス方式のため信号の衝突を避けるためにはデータを送 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(9)「100BASE-T1 」スクランブラ
スクランブラ スクランブラは、100BASE-T1 が動作時にコネクタやケーブルから放射する妨害波(EMI)を抑えるために実装された機能だ。電磁妨害波が他の機器の誤動作を引き起こすため、米国の FCC や日本の VCCI […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(10)「1000BASE-T1」概要
1000BASE-T1 登場の背景 2015年に 100BASE-T1 の標準化が完了したが、当時から 100Mbps では帯域不足との指摘があった。主な理由はカメラ映像の伝送だ。既に実用化された 100BASE-T1 […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(11)「1000BASE-T1」符号変換の概要 80B81B / RS FEC
初期の 10BASE5/2/-T は、伝送路上のフレーム間ギャップは無信号状態になっている。これは1本の伝送路を複数ノードで共有するバス方式のため、信号の衝突を避けるにはデータを送信していない期間を無信号にする必要がある […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(12)「1000BASE-T1」符号変換 スクランブル/3B2T/PAM3 変換
3B2T/PAM3 次に、3B2T/PAM3 変換の手順を説明する。 「図1 1000BASE-T1 符号化処理」は、3B2T/PAM3 の一連の信号変換の例だ。伝送クロックは 750MHz で、GMII の 125MH […]-
岩崎 有平
-
-
4-4.基礎から学ぶ車載 Ethernet 技術
基礎から学ぶ車載 Ethernet 技術(13)「1000BASE-T1」OAM / フレーム構造 / 上位層制約事項
OAM OAM(Operation / Administration / Maintenance)は、送信側 PHY と受信側 PHY がお互いの PHY リンクの健全性ステイタスを交換するために使用する。OAM は 1 […]-
岩崎 有平
-